![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Telepresencia virtual con Raspberry Pi
Robot basado en la placa Raspberry Pi cuyas imágenes capturadas se muestran a través de un teléfono móvil, que hace las veces de gafas de realidad virtual.

Además, y gracias al acelerómetro de dicho teléfono móvil, se pueden seguir los movimientos de la cabeza del usuario para que la cámara del robot se mueva en la dirección de esta, lo que permite al usuario una experiencia en tiempo real como si estuviera presente donde se encuentra el robot (telepresencia).
Robot con Raspberry Pi controlado a distancia
Enviando la señal a través de un sistema inalámbrico mediante radiofrecuencia (RF) o infrarrojo (IR) se puede controlar el robot. Para enviar una señal IR se necesita un transmisor y un receptor con un sistema de codificación y decodificación. Con un mando a distancia (TV, reproductor, etc.) y un receptor de IR acoplado al robot, podemos llegar a controlarlo a distancia.

Sistema de detección y aviso de incencios
Muchos de los incendios que ocurren en el monte podrían tener un menor alcance, o incluso mínimo, si de detecta a tiempo. Por otro lado, además de la detección, la rapidez en la actuación de los bomberos es crucial en este tipo de catástrofes.

El objetivo de este trabajo es construir un robot que pueda detectar los incendios y avisar al sistema de emergencias 112 para que se actúe en su extinción con rapidez. Para ello, empleamos una placa microcontroladora (Arduino o Raspberry Pi) y sensores fotodiodos infrarrojos (IR) simples que detectan los rayos IR que salen del fuego, además de un puerto para tarjeta SIM, que programamos para que -una vez detectado el incendio- el sistema efectúe una llamada automática al 112 avisando de tal incendio.
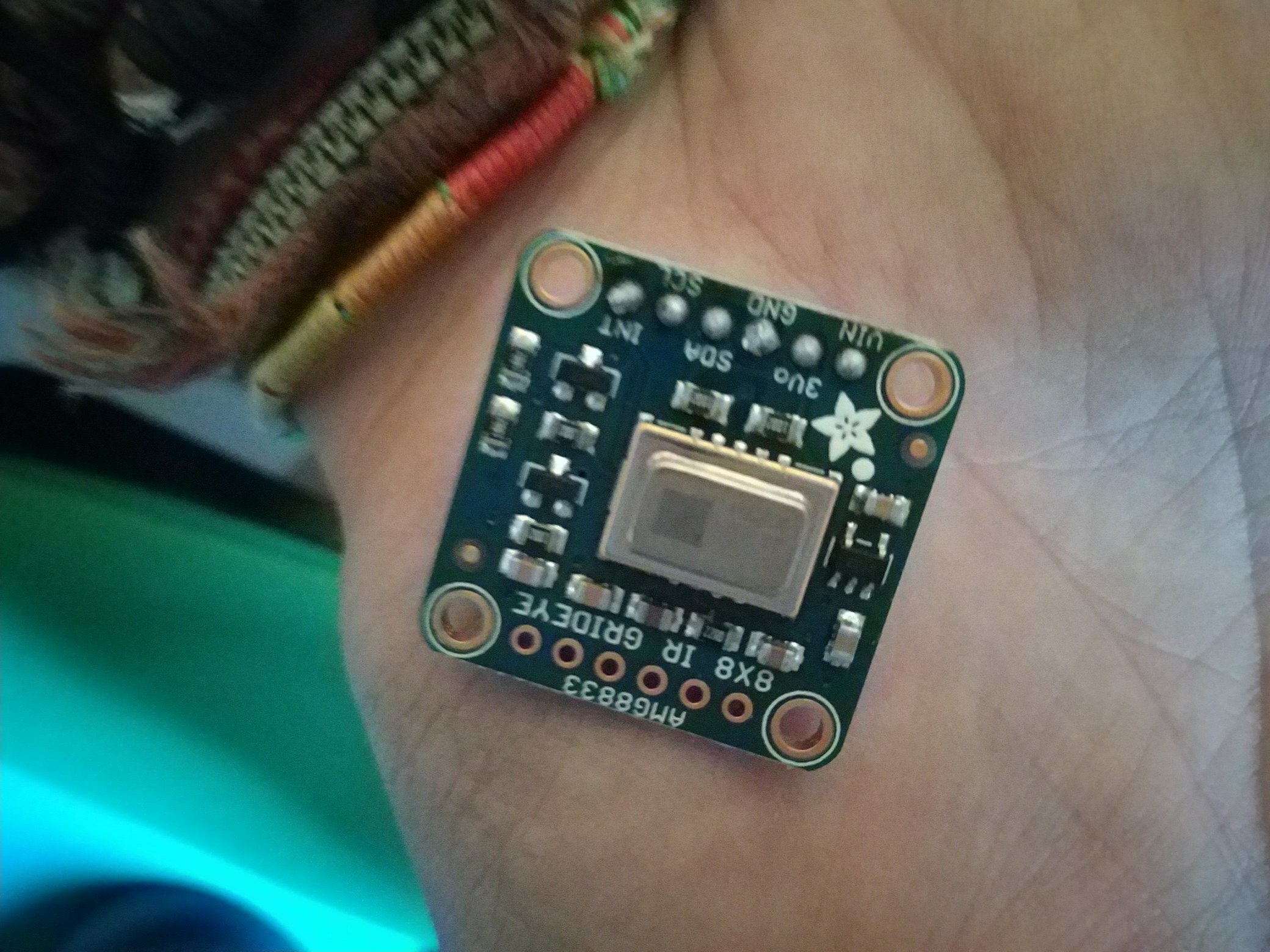
Otra forma de enfocar este proyecto es empleando una cámara térmica como la que vemos en la siguiente imagen, que ofrece una matriz de valores de temperatura. Por tanto, con esta se obtiene mucha más información que con los fotodiodos, como vemos en el vídeo.
Control por gestos de un robot
En este trabajo vamos a controlar un robot de forma inalámbrica utilizando gestos con las manos. Esta es una forma fácil y cómoda de interactuar con cualquier sistema robótico. Una vía es mediante el uso de acelerómetros, que detectan la posición de inclinación. Un microcontrolador obtiene diferentes valores analógicos que traduce en comandos para controlar el robot.
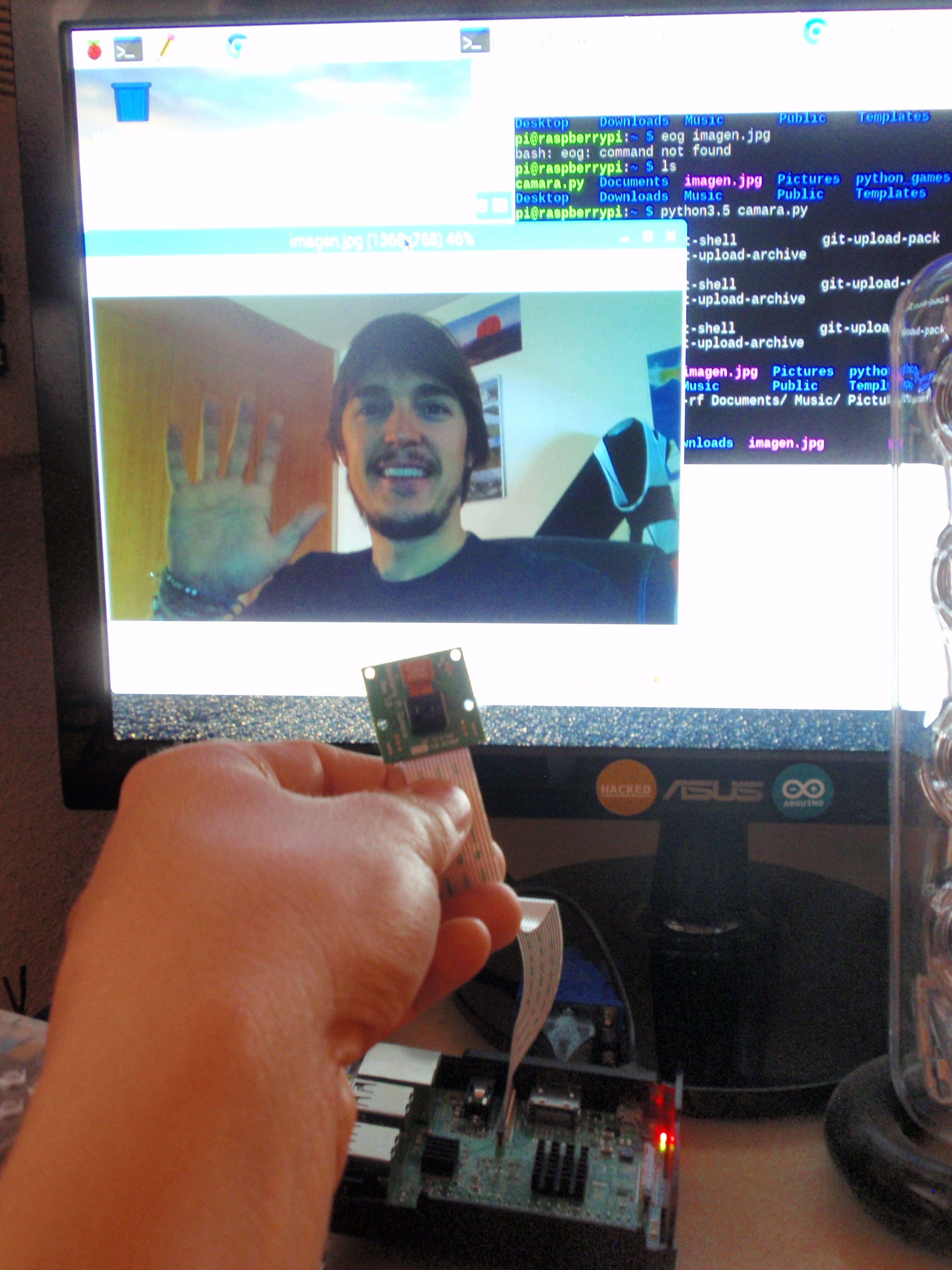
En nuestro caso, vamos a hacer uso de la placa controladora Raspberry Pi y la cámara cuyo puerto exclusivo incorpora esta, la Pi Camera. Usando técnicas de visión computacional podemos detectar movimiento según las imágenes percibidas por la cámara del robot; y lo que es más interesante, podemos distinguir qué movimiento se está realizando para, con ello, controlar el propio robot.
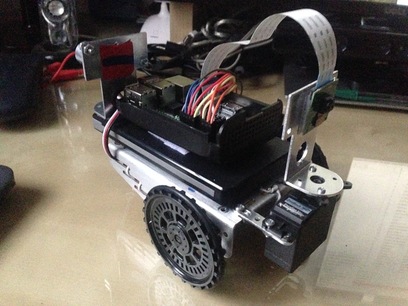
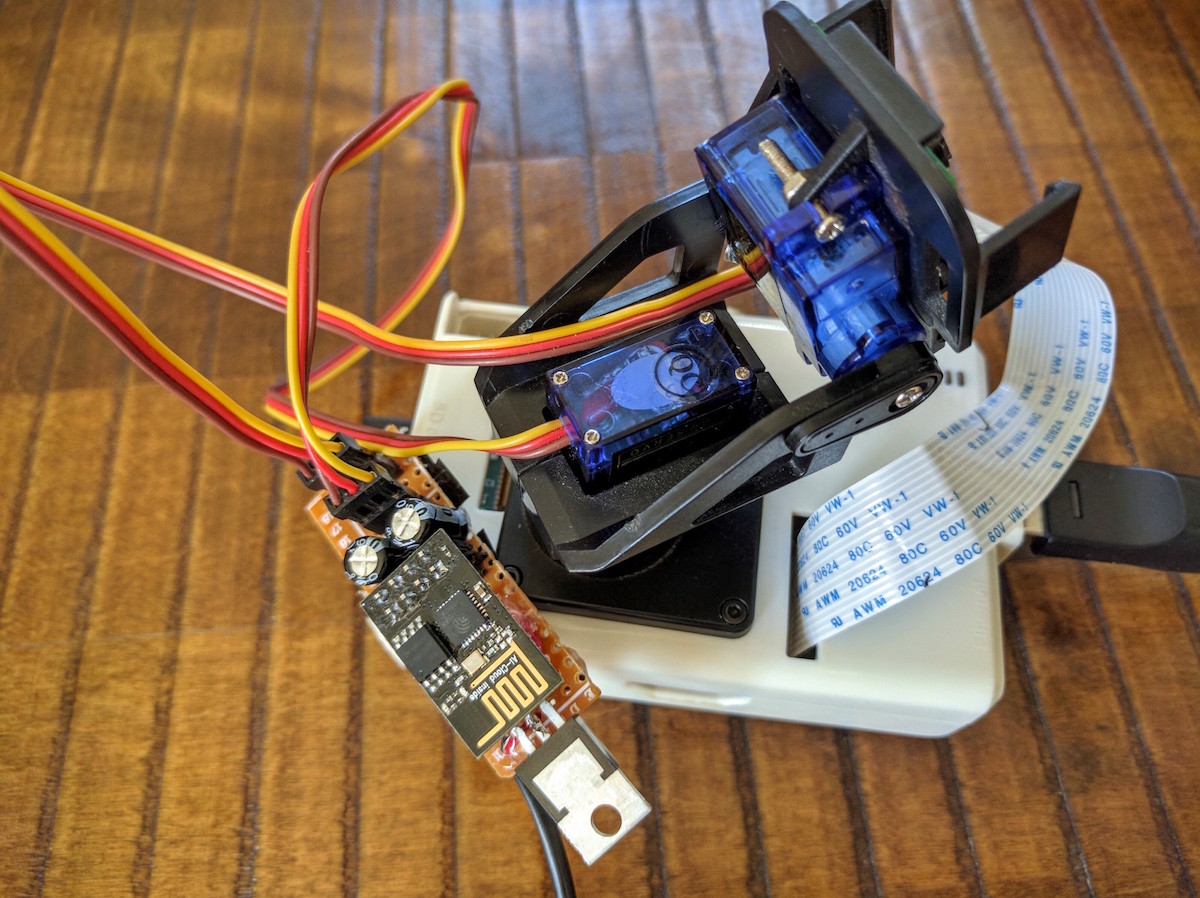
Sistema detector, identificador y de seguimiento de personas
Empleando una placa controladora capaz de gestionar las imágenes de una cámara y haciendo uso de técnicas de visión computacional, podemos detectar e identificar rostros humanos. Para ello vamos a usar la placa Raspberry Pi con la cámara Pi Camera, que anclaremos sobre un cuello mecánico (diseñado y construido mediante piezas 3D) y que estará accionado en ambos ejes vertical y horizontal por un par de motores.
El algoritmo de detección de rostros humanos lo implementamos apoyándonos en la librería de visión computacional OpenCV. También mediante técnicas de visión establecemos distintas regiones en la imagen, lo que nos permite ubicar en todo momento a la persona que se esté detectando; y lo que es más importante, la dirección del movimiento de esta, que nos va a permitir comandar los motores para hacerle un seguimiento. Por último, una base de datos de imágenes ya registradas nos va a permitir identificar a la persona en cuestión, haciendo uso de técnicas de matching learning.


