Current projects
-
VRX
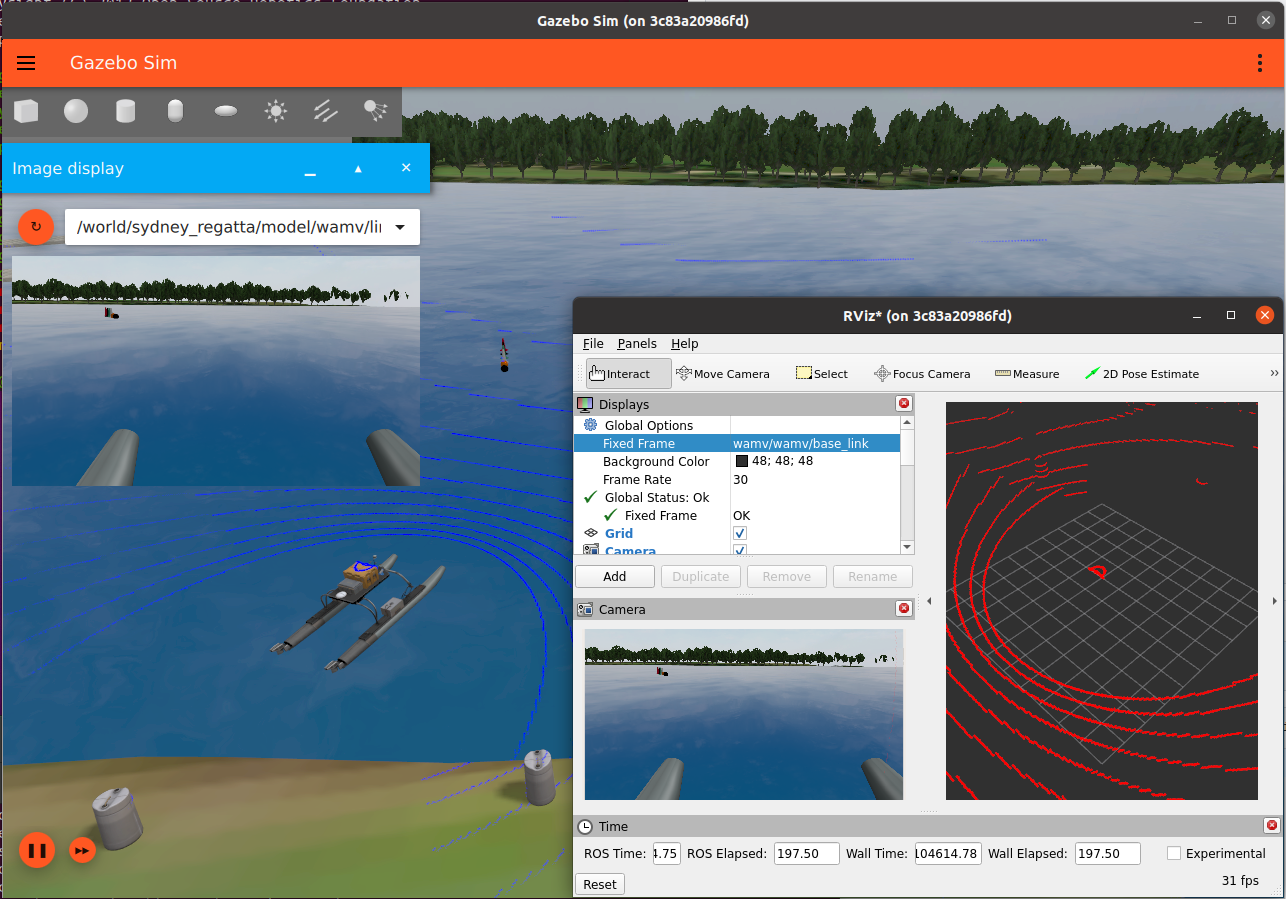
The Virtual RobotX project supports simulation of unmanned surface vehicles in marine environments. We designed it in coordination with the RobotX organizers..
Video highlights
Past projects
-
LRAUV

This project models the underwater Tethys robot from the Monterey Bay Aquarium Research Institute (MBARI) and develops a Gazebo simulation to let MBARI run their missions with multiple vehicles faster than real time.
Video highlights in this ROSCon talk
-
MBZIRC

I co-developed the simulation system for use by the organizers and competitors in the Mohamed Bin Zayed International Robotics Challenge (MBZIRC). Teams programmed the control of a multi-robot team (aerial and maritime) to find a target vessel. Then, teams used an arm mounted on a USV to retrieve objects from the target vessel into the USV. We also simulated communication among the members of the team.
Video highlights
-
SubT
I was involved in the development of the simulation for the virtual track of the DARPA Subterranean Challenge (SubT). We created a simulation where multi-robot teams had to navigate, find objects, and report their location to a base station simulating communications in subterranean environments.
Video highlights
-
Terminus
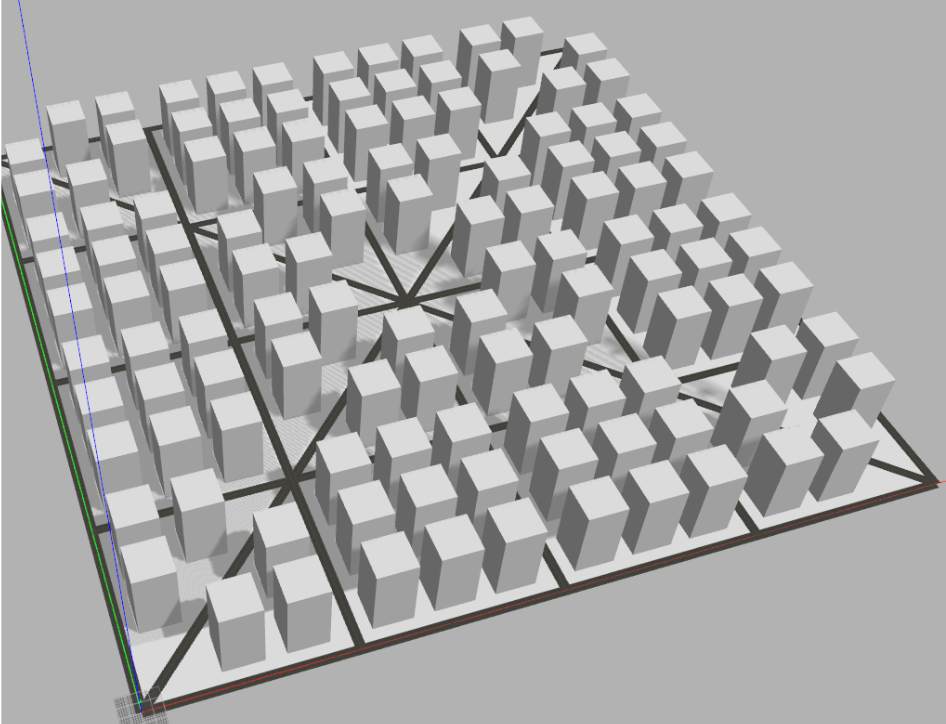
I co-developed a tool for procedural city generation using simulation. This tool used Open Street Map to created 3D buildings and roads from a certain region of the world.
Video highlights
-
ARIAC
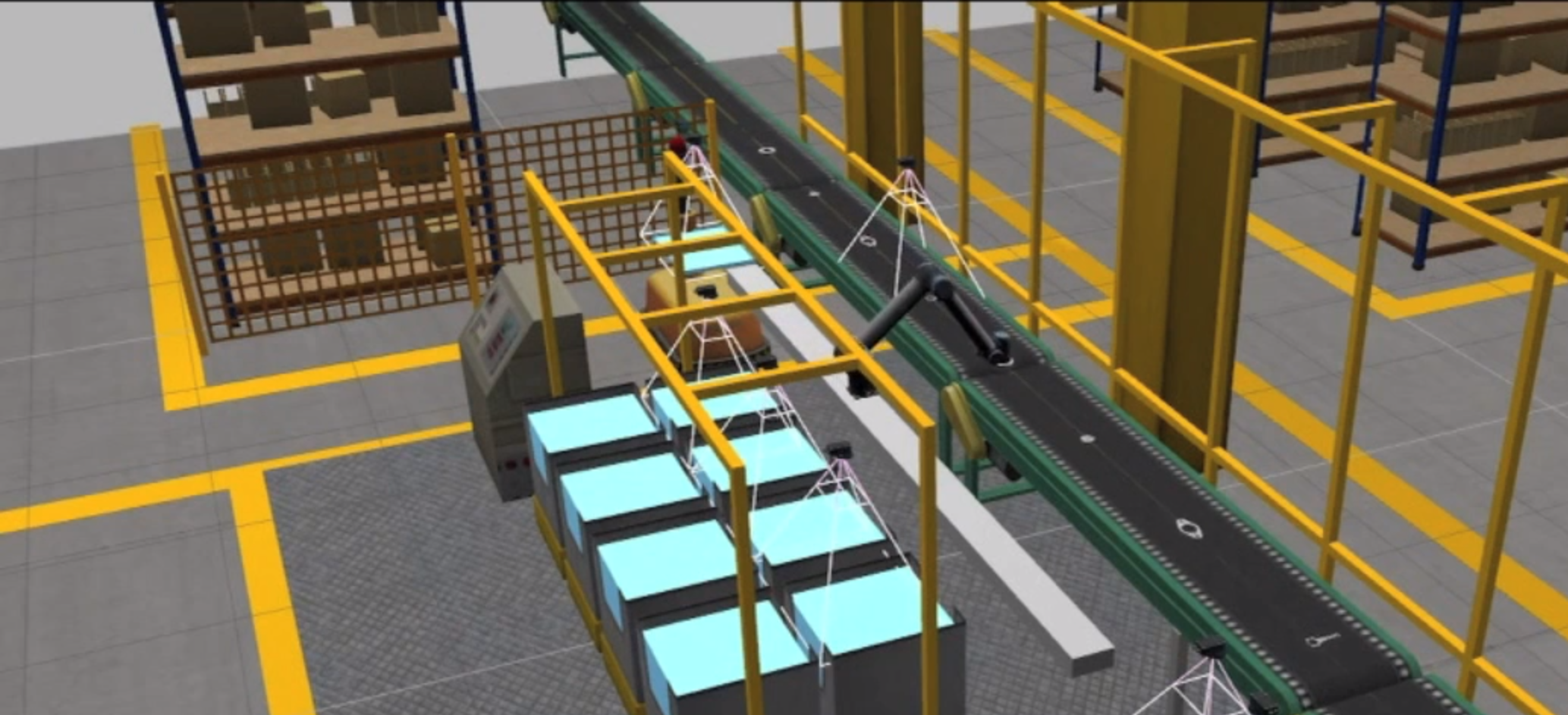
We developed the simulation environment for the Agile Robotics for Industrial Automation Competition (ARIAC) organized by the National Institute of Standards and Technology (NIST). The goal of this project is to deliver a system capable of simulating an industrial robot arm in a configurable automation environment equipped with sensors.
Video highlights
-
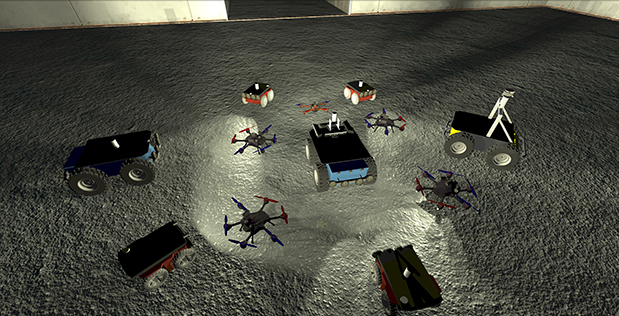
Swarm
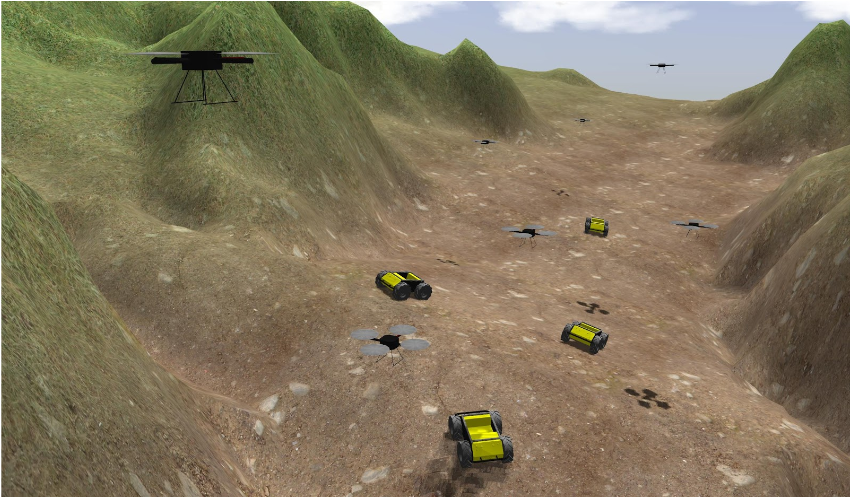
The DARPA Swarm project studies the problem of collective control of large teams (“swarms”) of air and/or ground robots. Our focus is the scalability of such teams with regards to communication systems and coordination algorithms.
Video highlights
-
HAPTIX
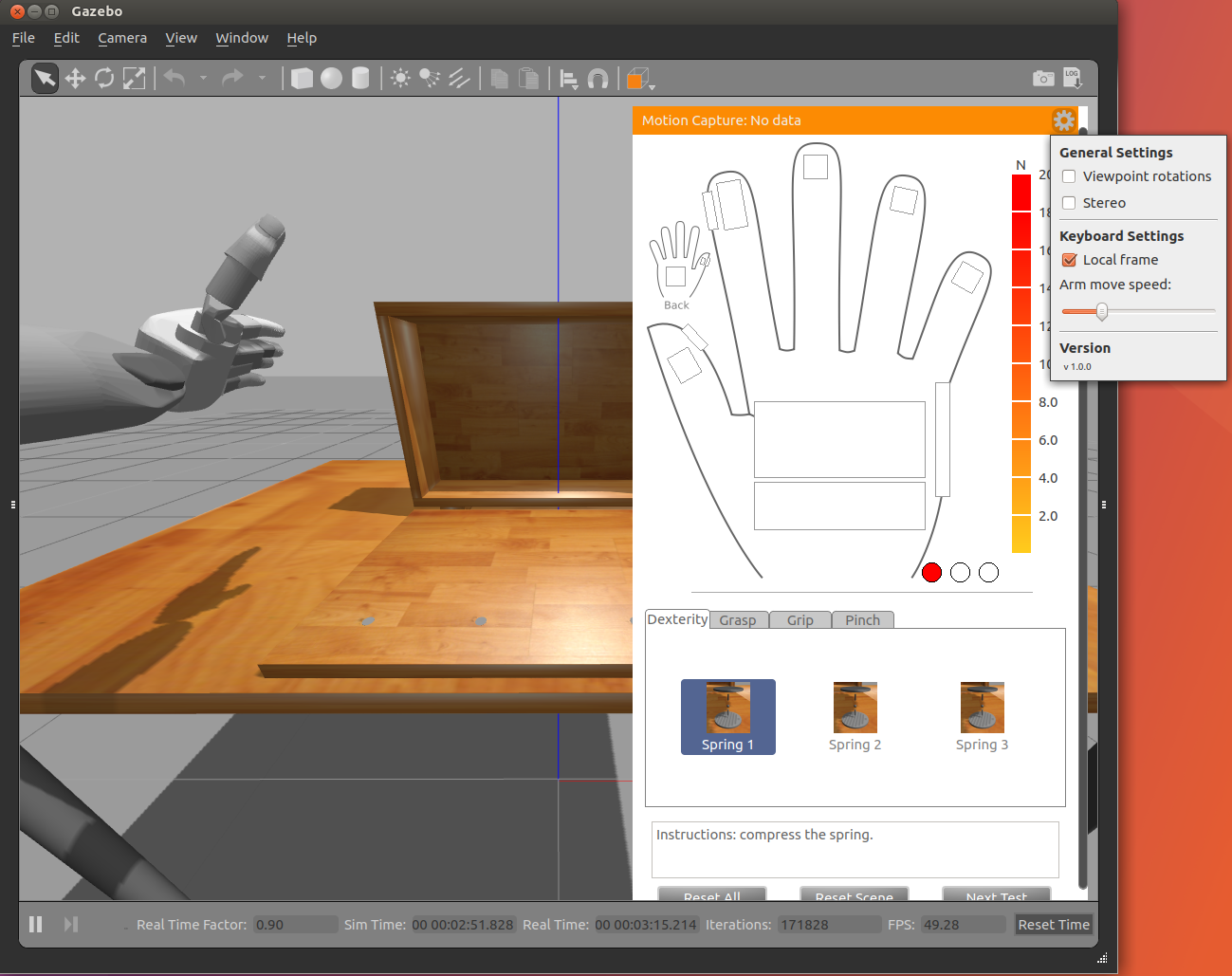
HAPTIX is a Gazebo-based project to enable the simulation of prosthetic devices of the kind that might be used by transradial amputees.
Video highlights
-
Virtual Robotics Challenge
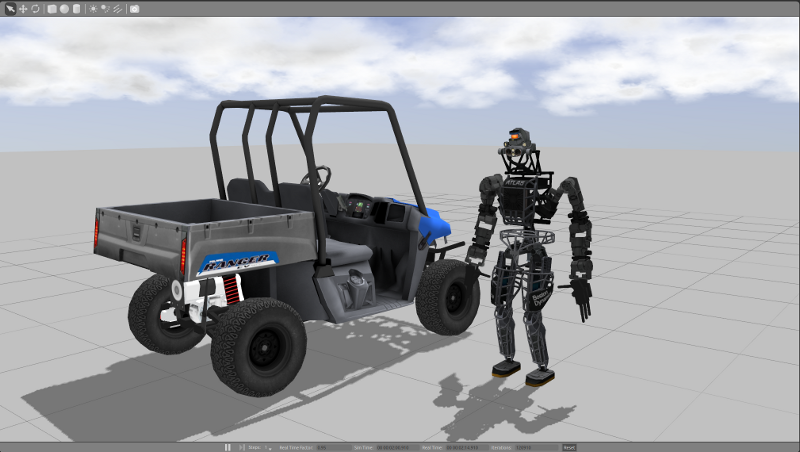
The Virtual Robotics Challenge is a cloud-based competition designed to develop semiautonomous robotic behavior using a simulated robot. As part of the OSRF staff, I co-participated in the development of the infrastructure for such event.
Video highlights
-
CloudSim
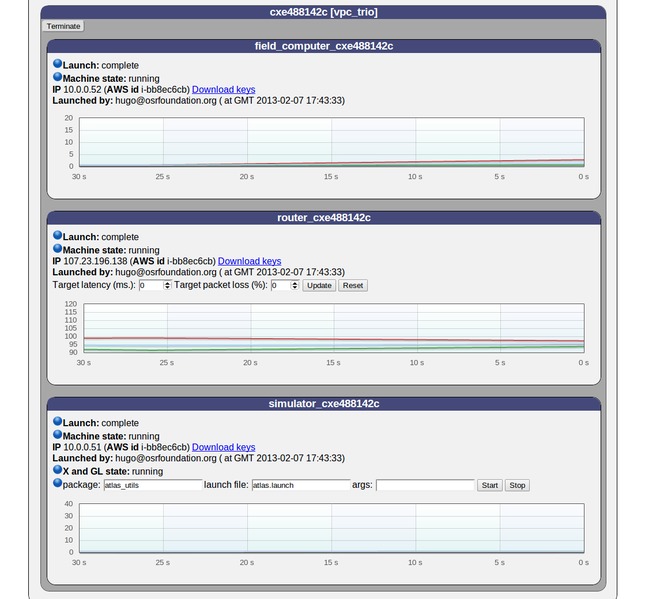
CloudSim is an open source web application that launches pre-configured machines on the cloud, designed to run many of the most common open source robotic tools, especially the open source robotics simluator Gazebo. CloudSim supports the DARPA Robotics Challenge, in which competitors are designing, programming, and testing robots to perform disaster response tasks.
-
Robot soccer

Long term project with lots of related research fields: robot architecture, self-localization, object localization, vision, communication, multi-robot cooperation, navigation, locomotion, obstacle avoidance. We have been selected for participating in RoboCup edition multiple years.
Video highlights
-
Alzheimer therapy with humanoid robots

We research how Alzheimer patients can improve their condition by interacting with a humanoid robot.
-
CoBot robots

CMU research project to develop fully functional and capable mobile robots in human environments. CoBots can proactively ask for help to humans, emerging what is called symbiotic autonomy.
Video highlights
-
Robocampeones
The goal of this project was to motivate the talent of high school students about engineering. A robotic competition was the key topic of this project, with hundred of students enrolled
-
Sensor monitorization
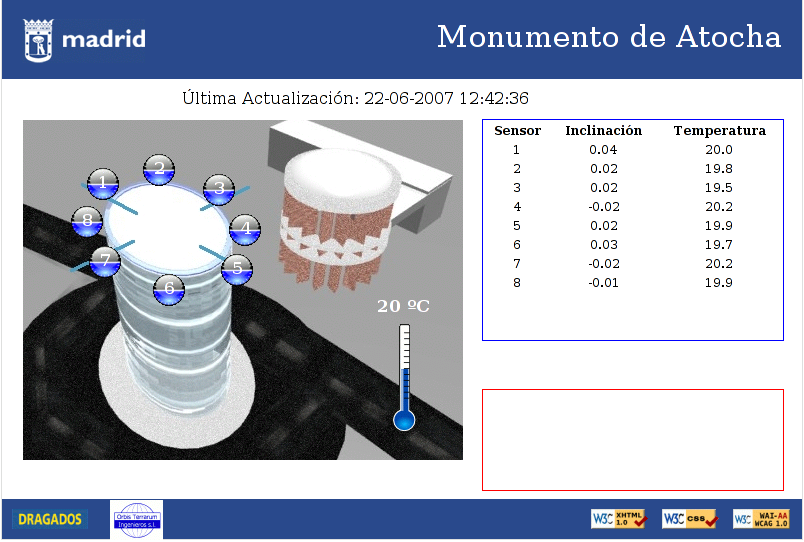
The aim of this project was the development of an automatic system to monitor the inclination of a monument.
-
Truck autonomous overtake
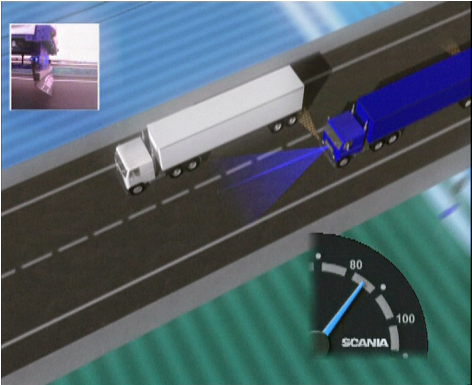
Research project in collaboration with the National Institute for Aerospace Technology (INTA). The aim of the project was the development of an autonomous system for detecting overtaking situations applied to trucks.
-
Ad-hoc protocols for mobile robots
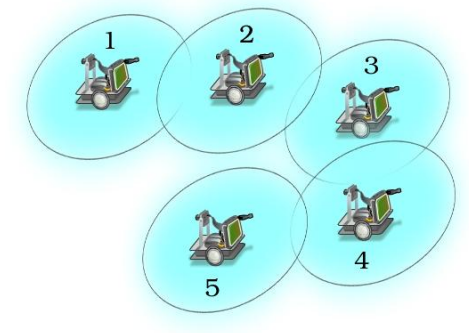
Research project in which some ad-hoc protocols were created to communicate mobile robots with limited communication capabilities.