![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Table of contents
- 2017.12.20. Getting coloured objects from an image
- 2017.10.25. Pan-Tilt Gripper PI-mBot prototype
- 2017.10.27. Pan-tilt gripper mBot in action
- 2017.10.25. New mBot prototype: pan-tilt gripper
- 2017.10.08. PiCamera working using Python code
- 2017.05.29. Family day in the high school. Meet-Edison competitions
- 2017.04.08. Cultural week in the high school. Meet-Edison exercises
- 2017.02.08. Bluetooth Arduino mBot navigation, programmed in Python
2017.12.20. Getting coloured objects from an image
We use Python programming language and OpenCV to create masks and get coloured objects from an image. The goal is to easy the "getColouredObject" function to younger students, under JdeRobot-kits platform.
There are lots of color-space conversion methods available in OpenCV. But we will look into only two which are most widely used ones, BGR -> Gray and BGR -> HSV.
For BGR -> Gray conversion we use the flags cv2.COLOR_BGR2GRAY. Similarly for BGR -> HSV, we use the flag cv2.COLOR_BGR2HSV. To get other flags, just run following commands in your Python terminal:
>>> import cv2
>>> flags = [i for i in dir(cv2) if i.startswith('COLOR_')]
>>> print flags
Once we have got the right range of a color, i.e. blue, we can extract a colored object as we can see on this video:
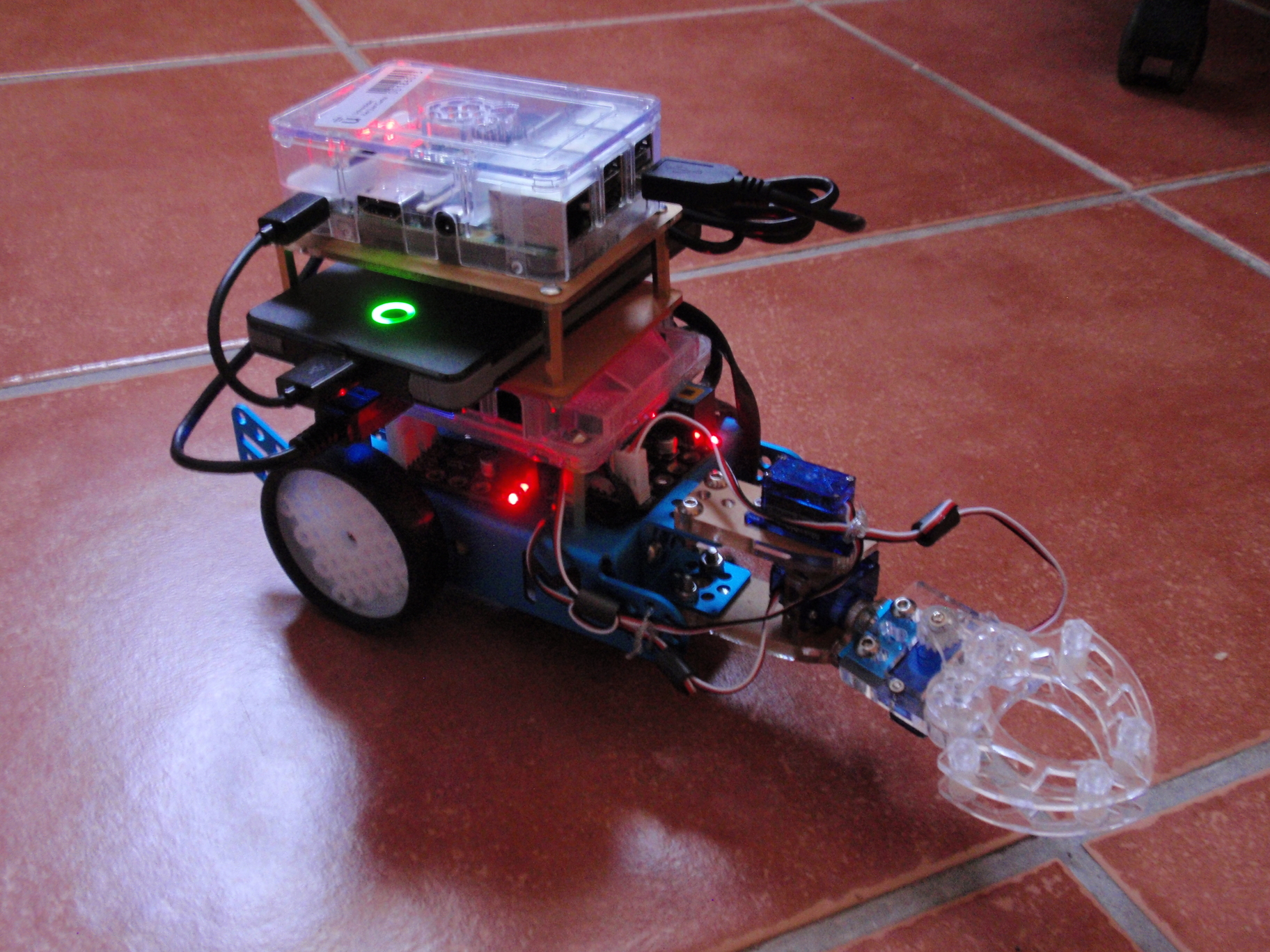
2017.10.25. Pan-Tilt Gripper PI-mBot prototype
I have just finished the new mBot prototype, adding the new huge feature: a Raspberry Pi 3, which is mounted and running thanks to an external 10.000 mAh battery.
2017.10.27. Pan-tilt gripper mBot in action
In this video we can see the new mBot prototype working with three servos: pan-tilt (2) and gripper (1). The code is Arduino-IDE, through the mBot plug-in. To be continued in Python and Arduino-Jderobot...
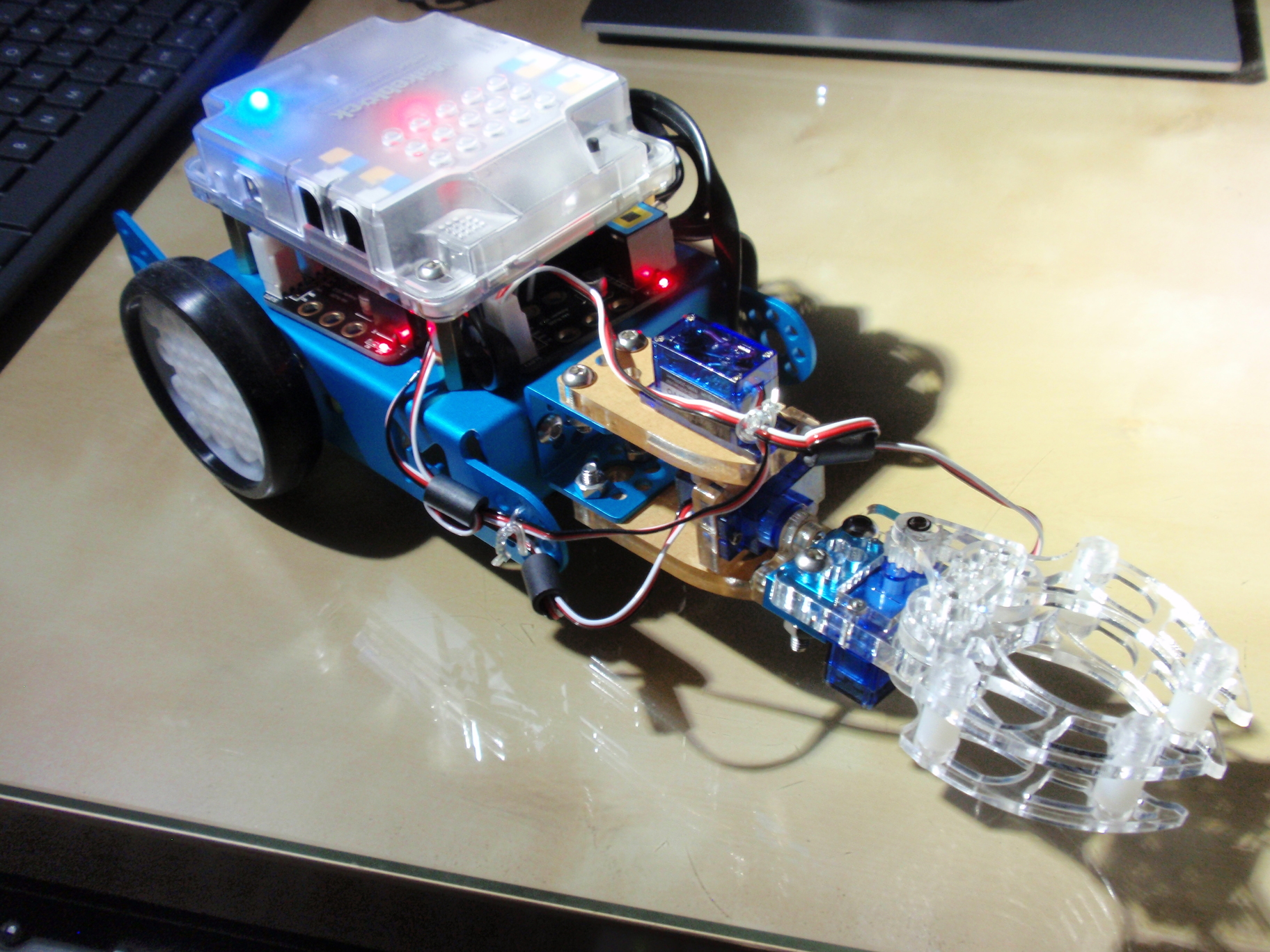
2017.10.25. New mBot prototype: pan-tilt gripper
I have just finished the new mBot prototype, adding new features thanks to a gripper mounted over a pan-tilt unit. I am using three servos through two RJ25 adapters (with two slots per each). The result is as following:
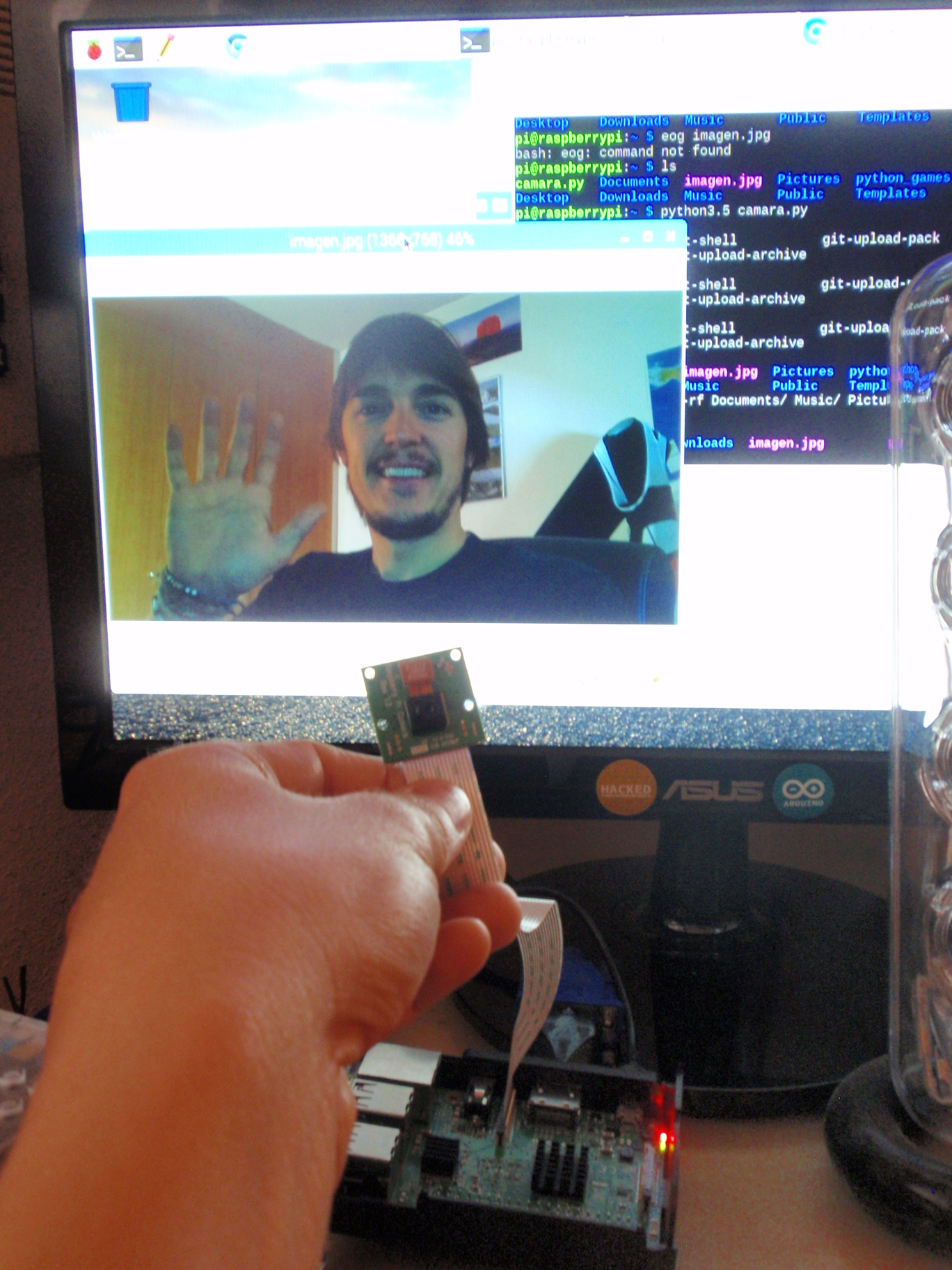
2017.10.08. PiCamera working using Python code
After several failed tries, PiCamera is working under Raspbian OS (Stretch), using Python code.
2017.05.29. Family day in the high school. Meet-Edison competitions
2017.04.08. Cultural week in the high school. Meet-Edison exercises
Bump and go
Follow light
Follow line
Sumo
2017.02.08. Bluetooth Arduino mBot navigation, programmed in Python
In this video we can see a mBot robot Arduino navigating avoiding obstacles thanks to its us sensor which is recognizing surroundings all the time and it is able to correct wheels according to the circumstances.
It is programmed in Python language, and it is linked to the PC through the Bluetooth receiver.


