![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Table of contents
- 2021.07.08. Raspberry Pi SW interrupts through GPIO pins
- 2021.06.15. Comparing Intel Neural Stick performance using Raspberry Pi as main board
- 2021.04.29. Testing Intel Neural Stick performance using Jetson Nano as main board
- 2021.03.07. Practising with the new Intel Neural Stick
- 2021.02.23. Building the new Dexter robot based on a Raspberry Pi 3 VS PiBot
2021.07.08. Raspberry Pi SW interrupts through GPIO pins
Interrupts are a very important mechanism to be used to receive info from sensors. Otherwise, the CPU could be collapsed when polling the pin (to which the sensor is connected) status value.
Since Raspberry Pi doesn't support hardware interrupts (as Arduino does), they have to be simulated using software interrupts and the
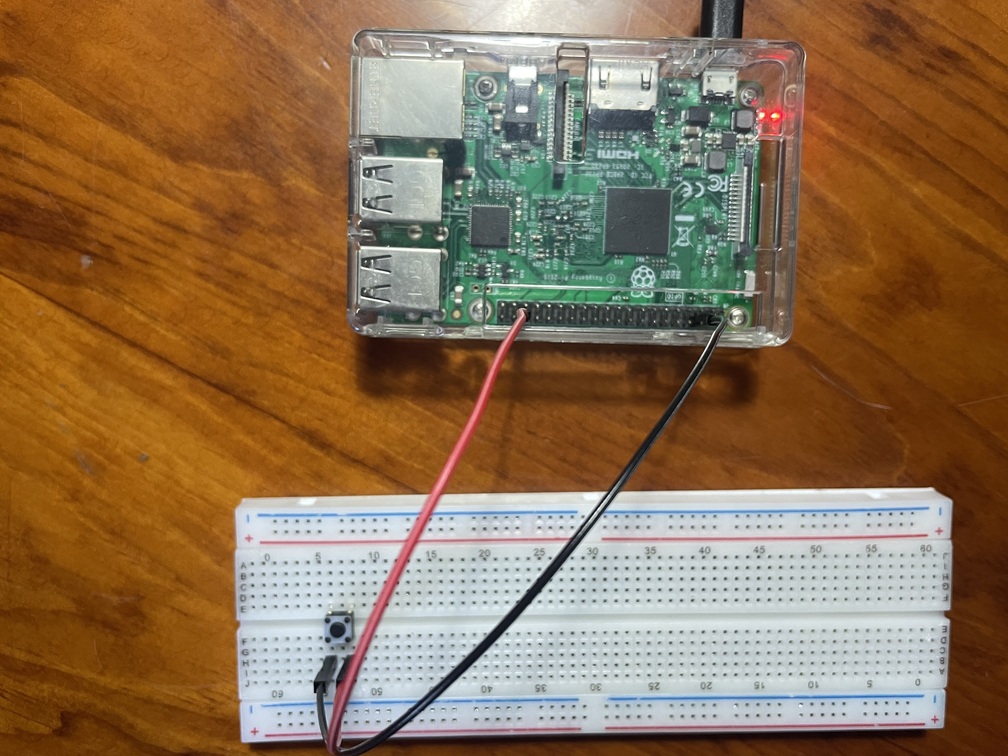
The code can be found in this GitHub repository.
2021.06.15. Comparing Intel Neural Stick performance using Raspberry Pi as main board

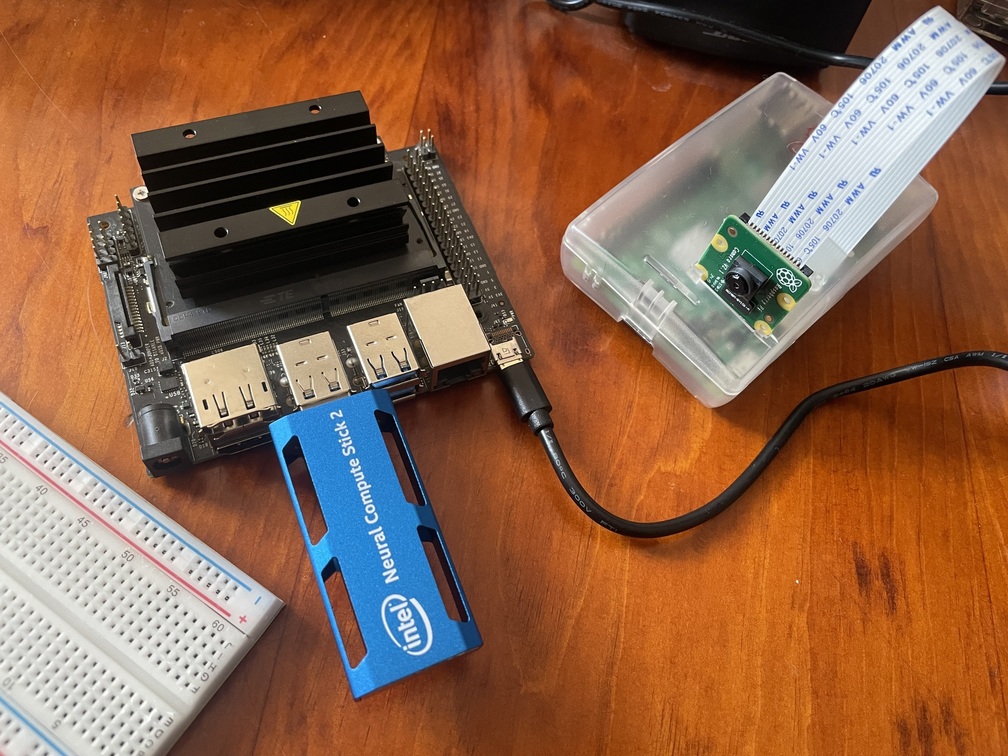
2021.04.29. Testing Intel Neural Stick performance using Jetson Nano as main board
2021.03.07. Practising with the new Intel Neural Stick
2021.02.23. Building the new Dexter robot based on a Raspberry Pi 3 VS PiBot



