![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Table of contents
- 2011.12.07. Parallelograms attention system
- 2011.12.05. Recognizing parallelograms
- 2011.11.25. Long term memory
- 2011.11.23. Geometric model includes Pan & Tilt movements
- 2011.11.10. Corridor reconstruction
- 2011.11.22. Short term memory
- 2011.10.20. Visual memory on movement
- 2011.10.11. 3D segments reconstruction with Solis Algorithm
- 2011.10.06. New Visual Memory GUI
- 2011.09.12. Solis Algorithm
- 2011.05.26. New GUI with several windows
- 2011.05.18. New 3D segments reconstruction with JDE-5.0 implementation
- 2011.05.11. Instant 3D segments
- 2011.03.17. 3D department with drip effect
- 2011.03.14. Follow-line
- 2011.03.14. New 3D department building
- 2011.03.14. Jarama circuit
- 2011.03.11. Introrob class diagram
- 2011.02.24. Running new Introrob
- 2011.02.16. New IntrorobGUI
2011.12.07. Parallelograms attention system
Parallelograms guides the attention system. We can see a blue cross on the floor, which symbolize where the camera is pointing. It has to match with the parallelogram center where camera is pointing to.
Sometimes, the robot attention system generates a random focus-point in order to explore all scene around itself.
2011.12.05. Recognizing parallelograms
Now, system is able to hypothesize parallelograms. It just needs to get three points which are forming a parallelogram shape.
2011.11.25. Long term memory
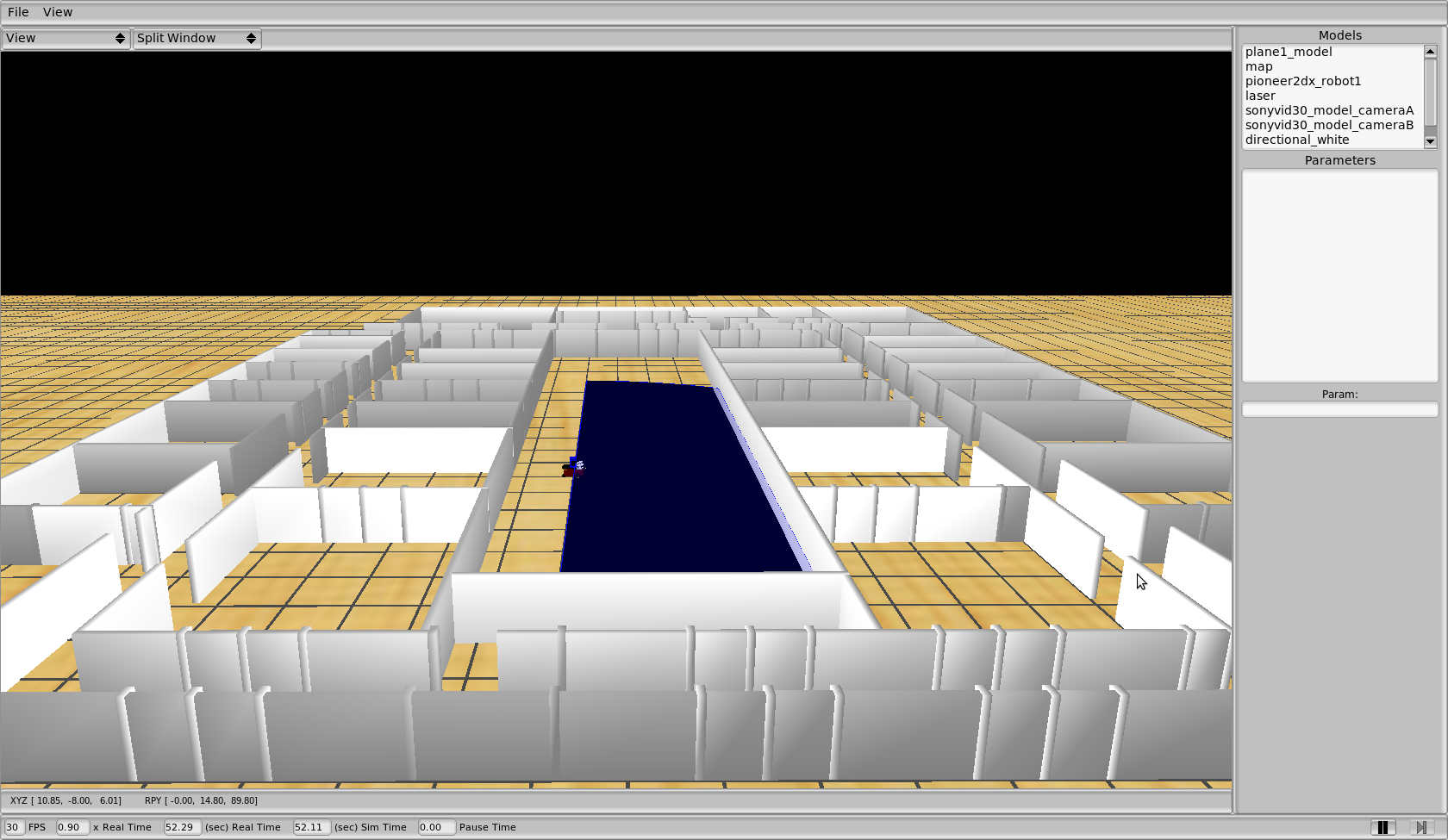
In these experiments, the robot goes around the corridor of our building and it does a complete lap.
2011.11.23. Geometric model includes Pan & Tilt movements
Now we have included pan & tilt movements to the geometric model.
2011.11.10. Corridor reconstruction
2011.11.22. Short term memory
Here we can see how our system is able to recognize segments from scene around robot.
2011.10.20. Visual memory on movement
2011.10.11. 3D segments reconstruction with Solis Algorithm
We recognize 2D segments on the 2D image with Solis Algorithm and then, they're back-projected over floor (ground hypothesis). We can see in this image result is plausible.
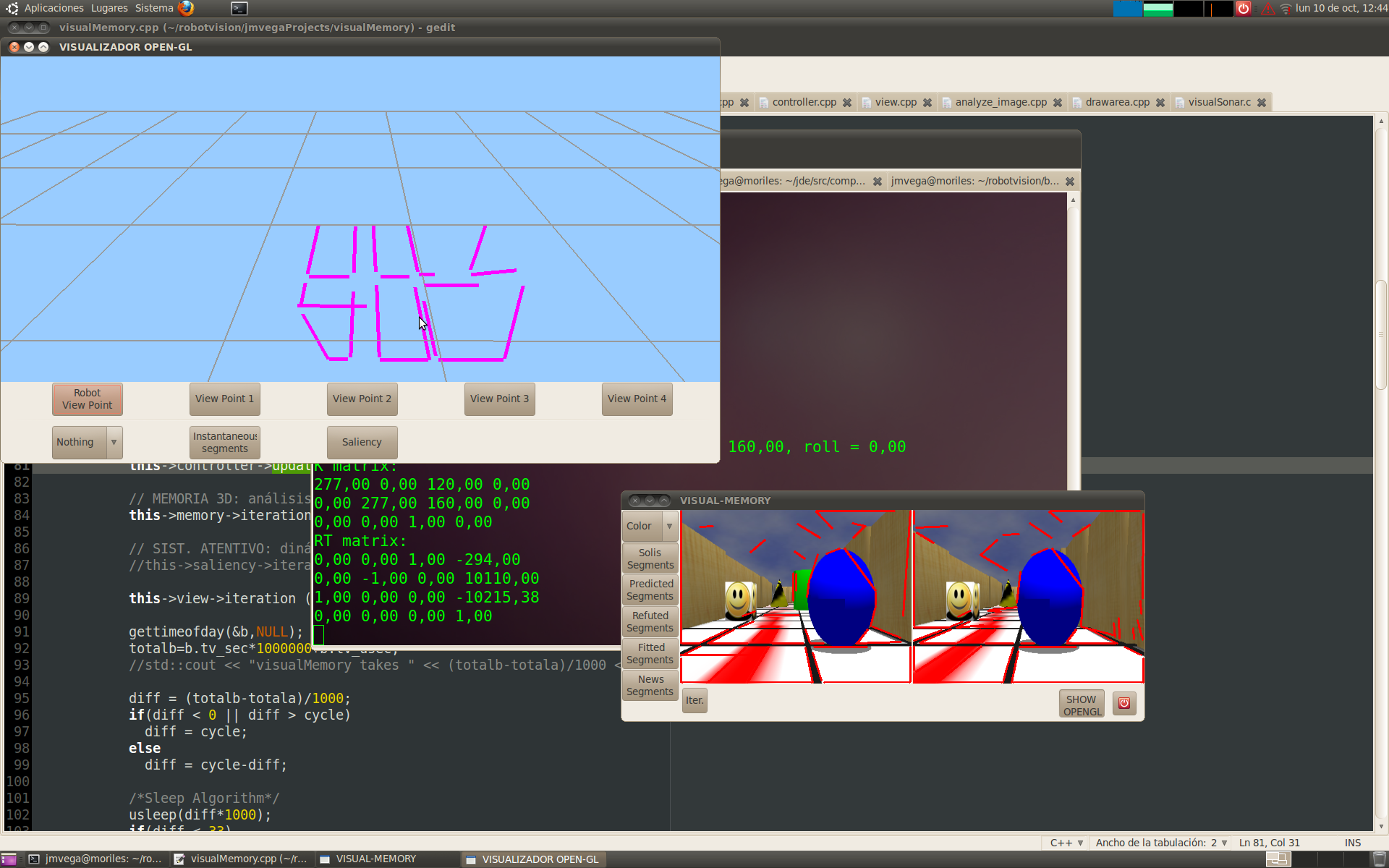
2011.10.06. New Visual Memory GUI
Here we can see the new GUI.
2011.09.12. Solis Algorithm
We can see the 2D segmentation algorithm based on a Solis' paper. It's work fine, much better than Canny+Hough Transform process.
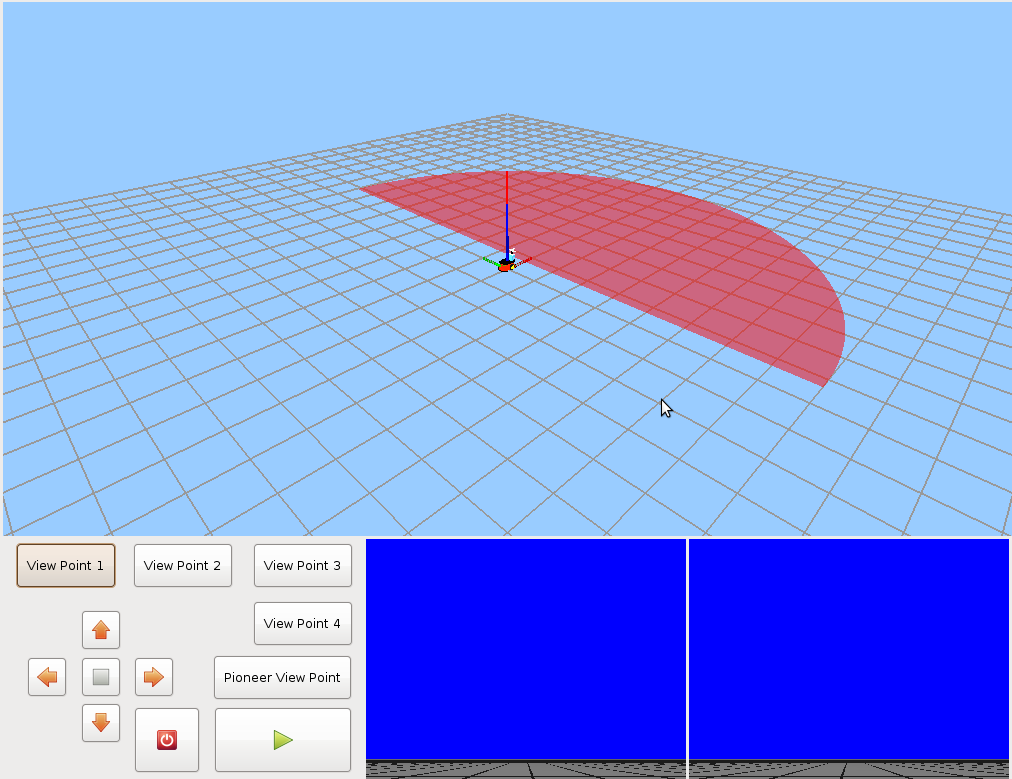
2011.05.26. New GUI with several windows
On this video, we show the new functionality. Our schema includes three windows: main, opengl and navigation controller.
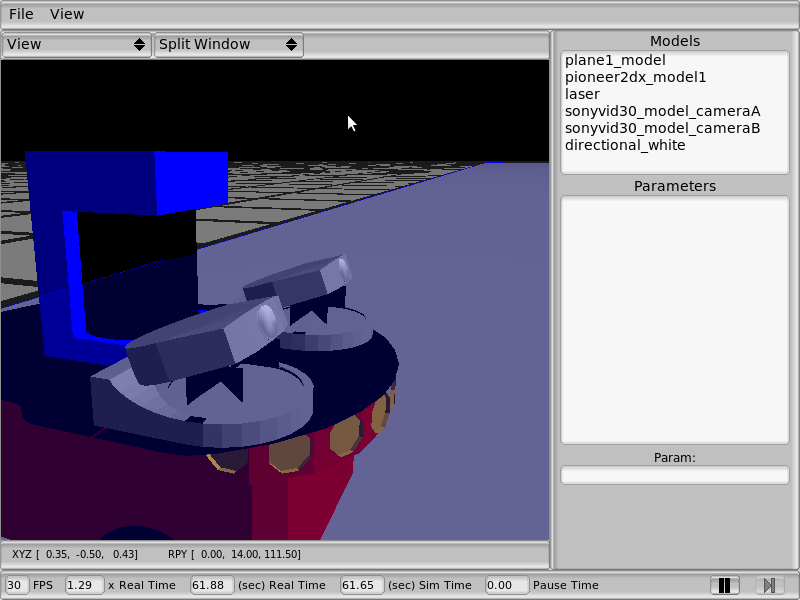
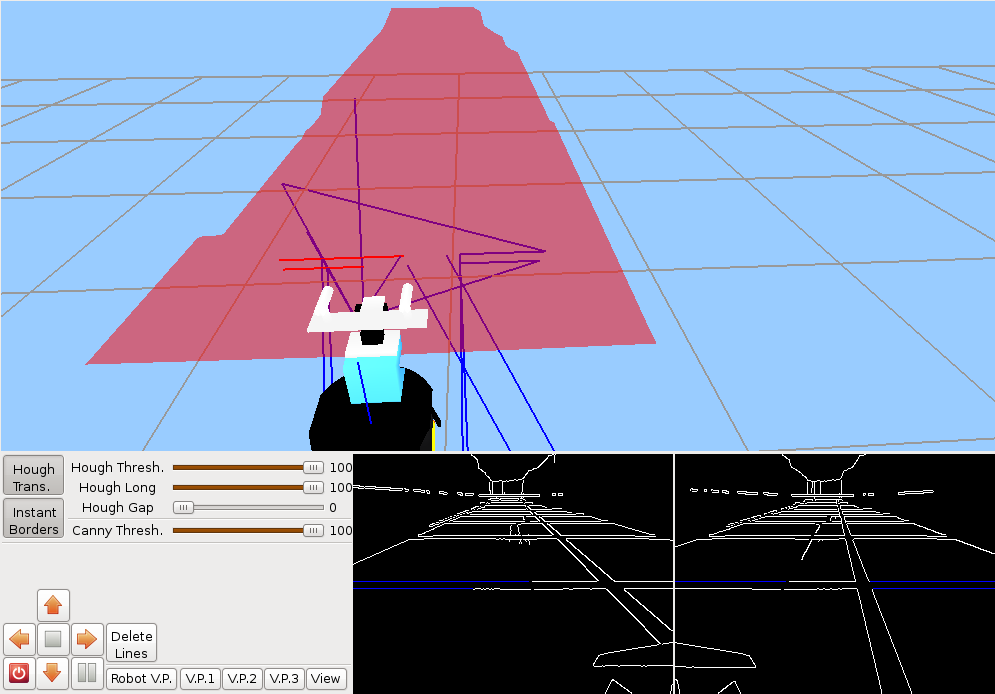
2011.05.18. New 3D segments reconstruction with JDE-5.0 implementation
We start to implement our visual memory under Jde-5.0 implementation. Now, our algorithm is inside an Ice component, codified in C++ language.
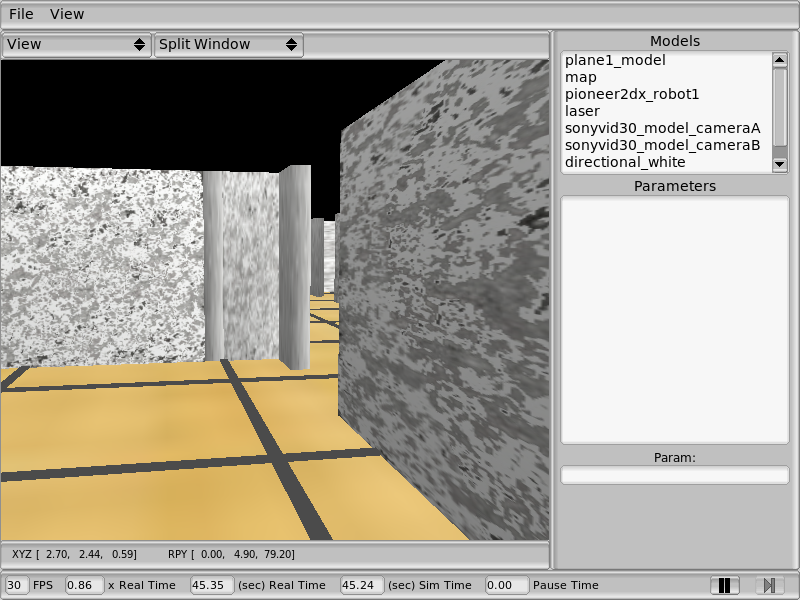
We're using Gazebo 0.9 as a robotics simulator and a Pioneer 2DX as a robot platform, with two Sony PTZ simulated cameras.
In this first step, we try to recognize 2D segments on the 2D image and then, they're back-projected over floor (ground hypothesis). Our algorithm uses Canny as a border filter and Hough Transform as a segment filter. We can see in this image result is not plausible.
2011.05.11. Instant 3D segments
2011.03.17. 3D department with drip effect
2011.03.14. Follow-line
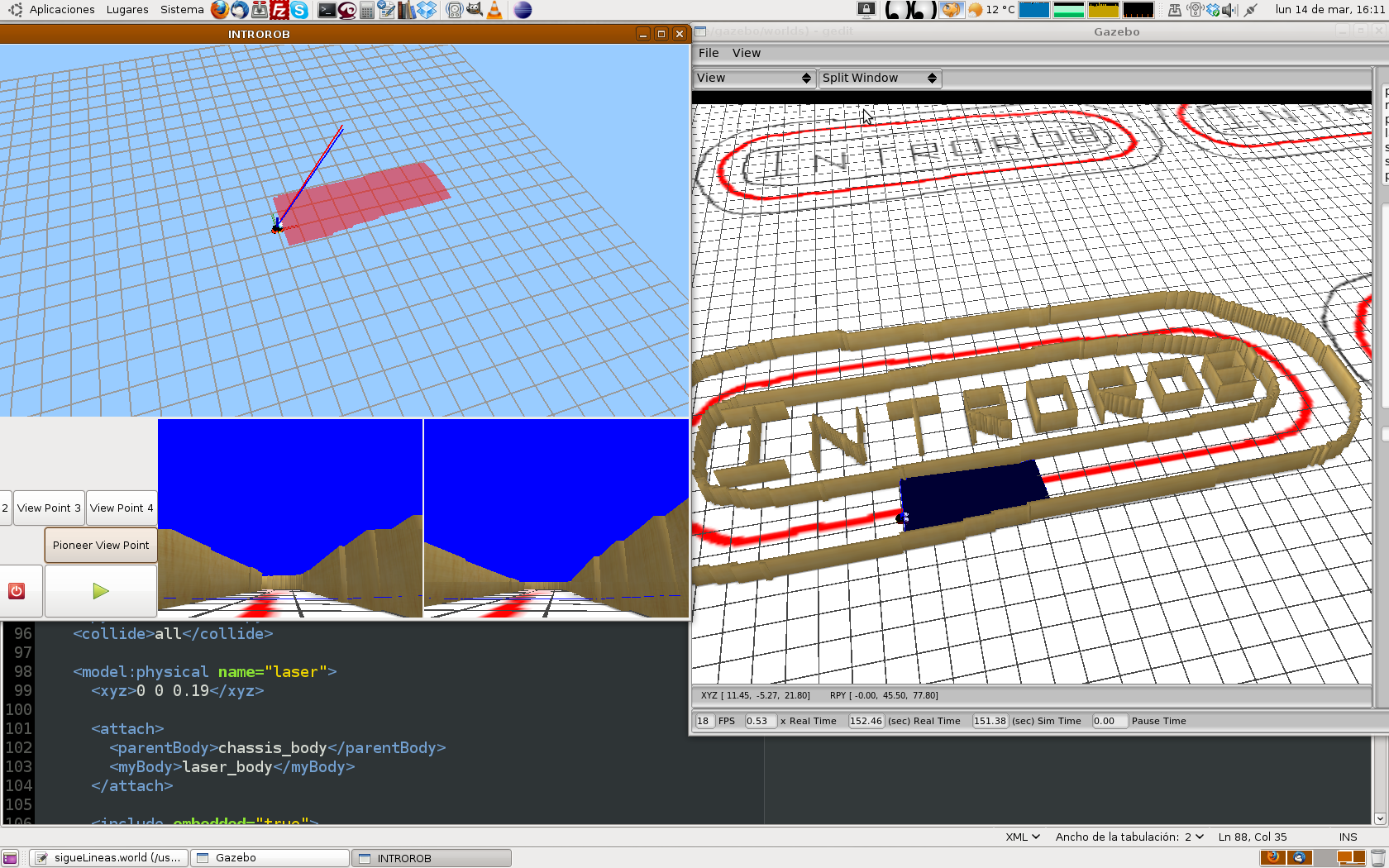
2011.03.14. New 3D department building
2011.03.14. Jarama circuit
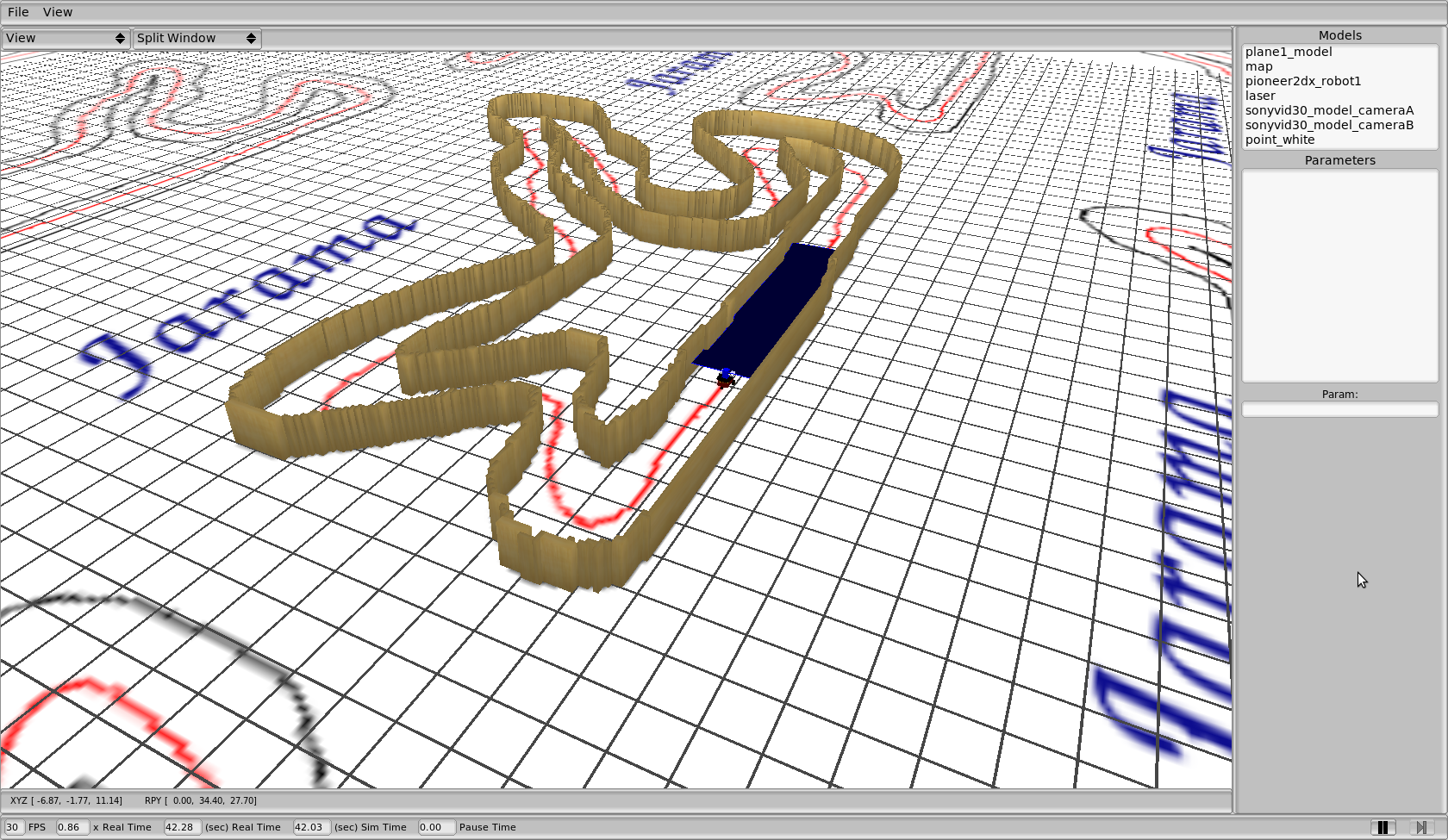
2011.03.11. Introrob class diagram
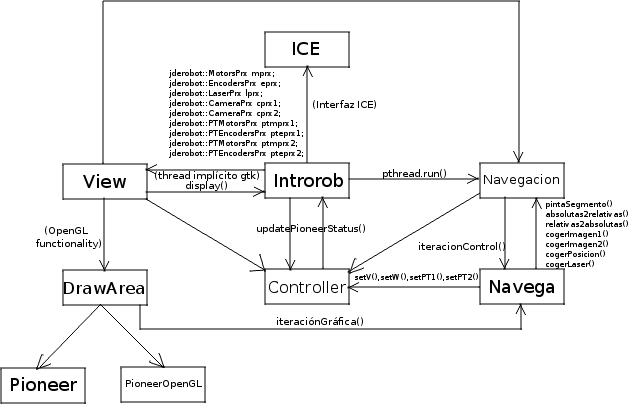
2011.02.24. Running new Introrob