![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Table of contents
- 2019.09.29. PiBot follow-person
- 2019.09.24. PiBot PiCam Vs. Logitech
- 2019.09.24. PiBot vision experiments
- 2019.09.20. New PiBot
- 2019.09.13. MBot modified with US model HC-SR04
- 2019.08.23. Raspberry Pi temperature sensor
- 2019.08.23. Raspberry Pi thermal camera
- 2019.08.03. MBot leds on board depending on US sensor distances
- 2019.08.03. MBot leds on board depending on motors actions
- 2019.08.03. MBot leds on board depending on IR sensor B/W colors
- 2019.07.28. MBot follow-line
- 2019.07.28. MBot bump-and-go
- 2019.06.24..28. URJC Robotics Summer Camp
- 2019.06.26. 3D printed PiBot
- 2019.05.21 Integrating traffic signals into the PiBot's Carpet city
- 2019.04.09 Testing the city simulated world in Gazebo by OSRF
- 2019.03.27 Global navigation using Gradient Path Planning (GPP) algorithm
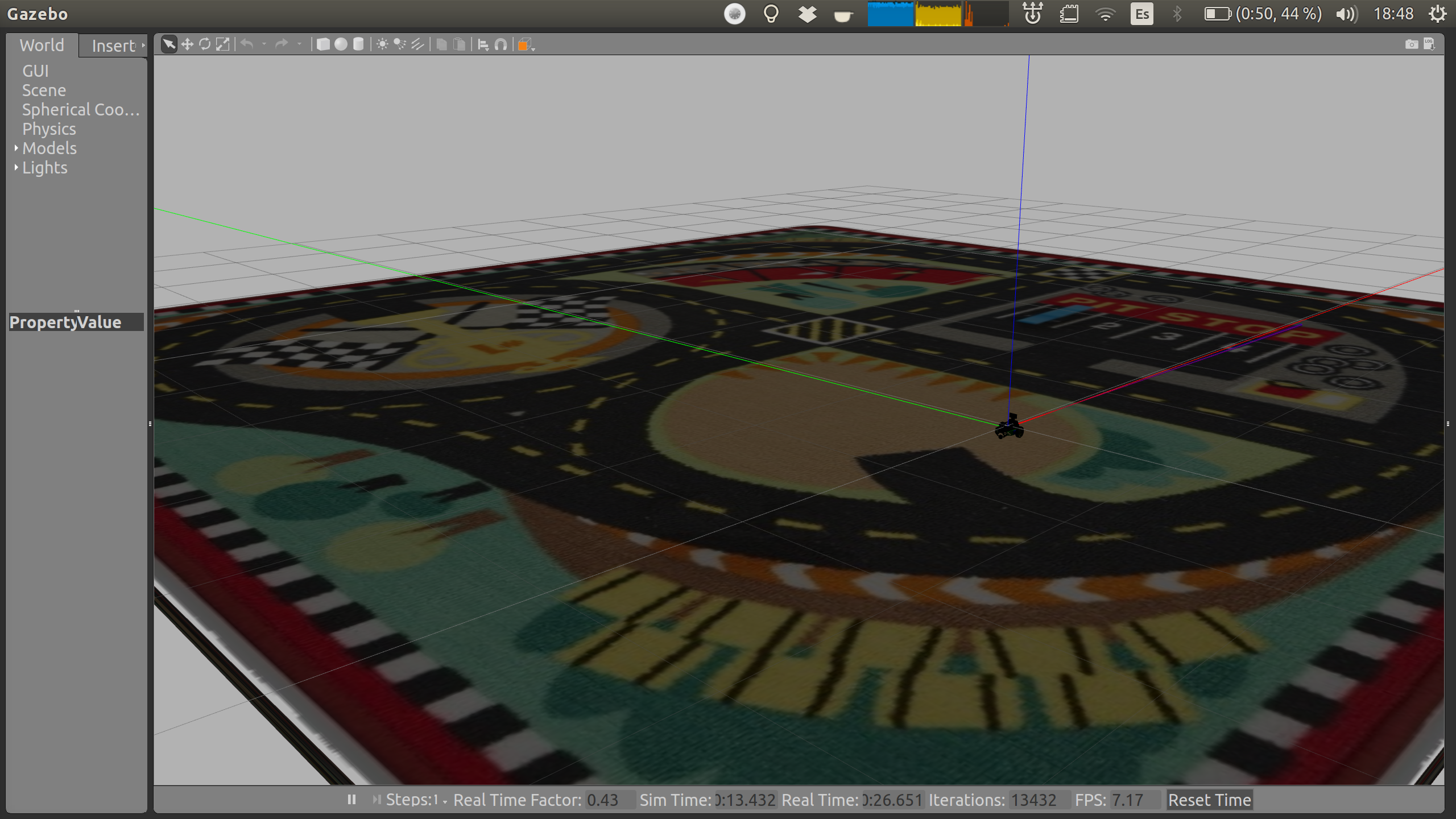
- 2019.03.26 New Gazebo worlds for PiBot based on carpets for kids
- 2019.03.05 New Turtlebot VFF demos
- 2019.02.26 VFF obstacle avoidance exercise with the real Turtlebot
- 2019.02.19 Follow-Line exercise with the real Turtlebot
- 2019.02.13 Mounting the RPLidar over Turtlebot (second part)
- 2019.02.05 Mounting the RPLidar over Turtlebot
- 2019.01.28 Testing the RPLidar laser sensor
- 2019.01.22 Testing the follow-line exercise with simulated Kobuki/Turtlebot
- 2019.01.18 New exercise for Academy: follow-line in real and simulated Kobuki/Turtlebot
2019.09.29. PiBot follow-person

2019.09.24. PiBot PiCam Vs. Logitech

2019.09.24. PiBot vision experiments







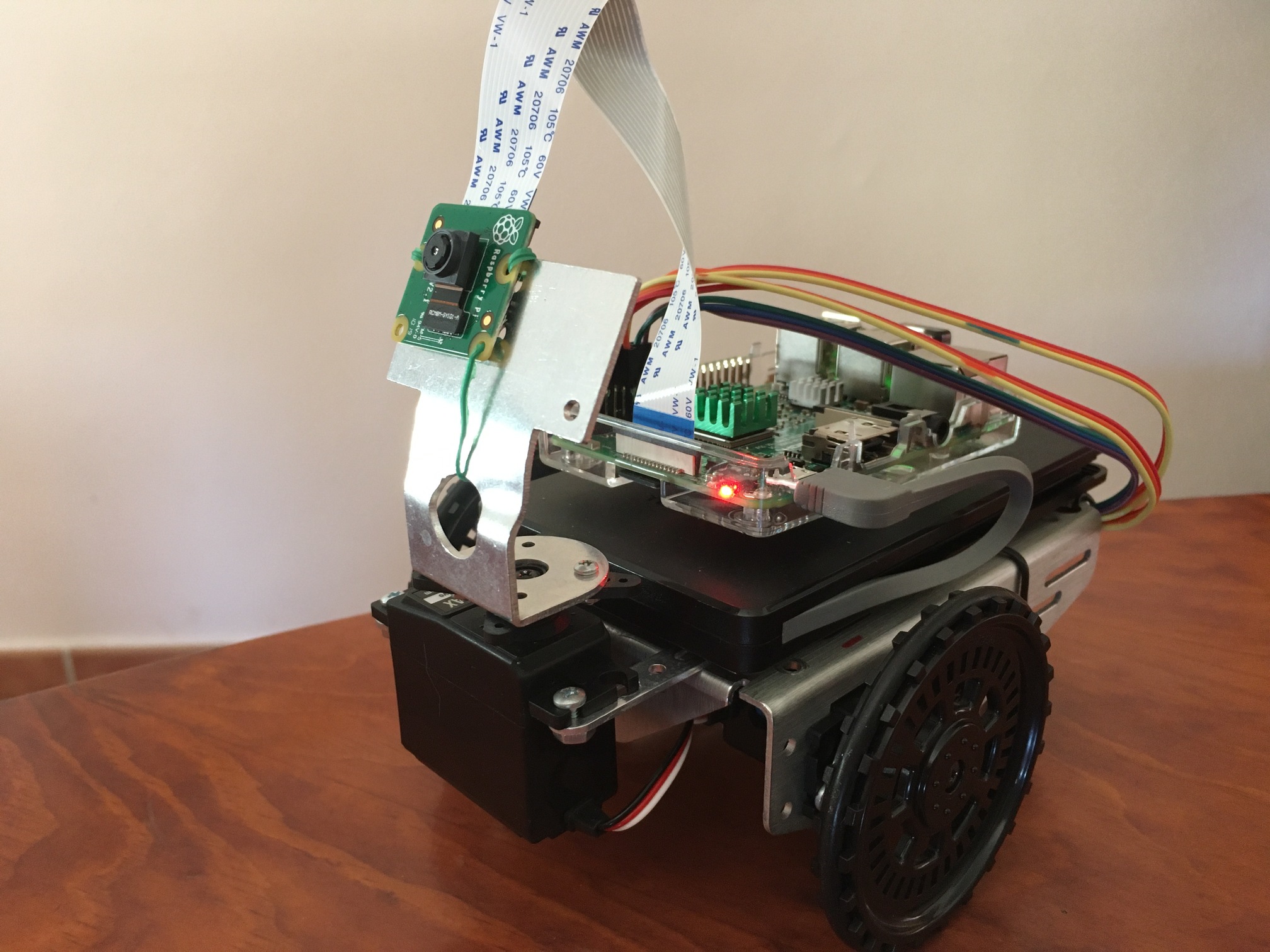
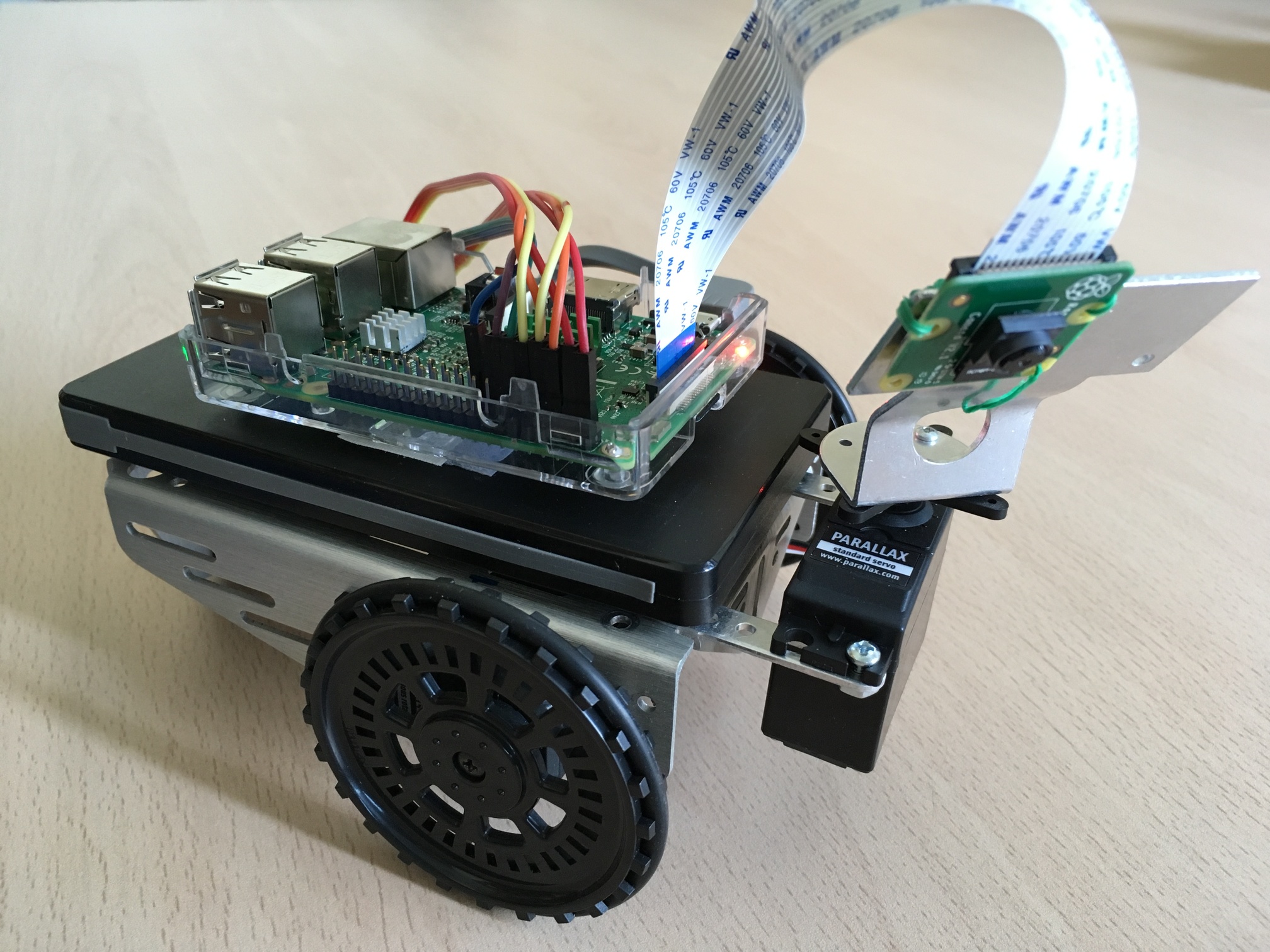
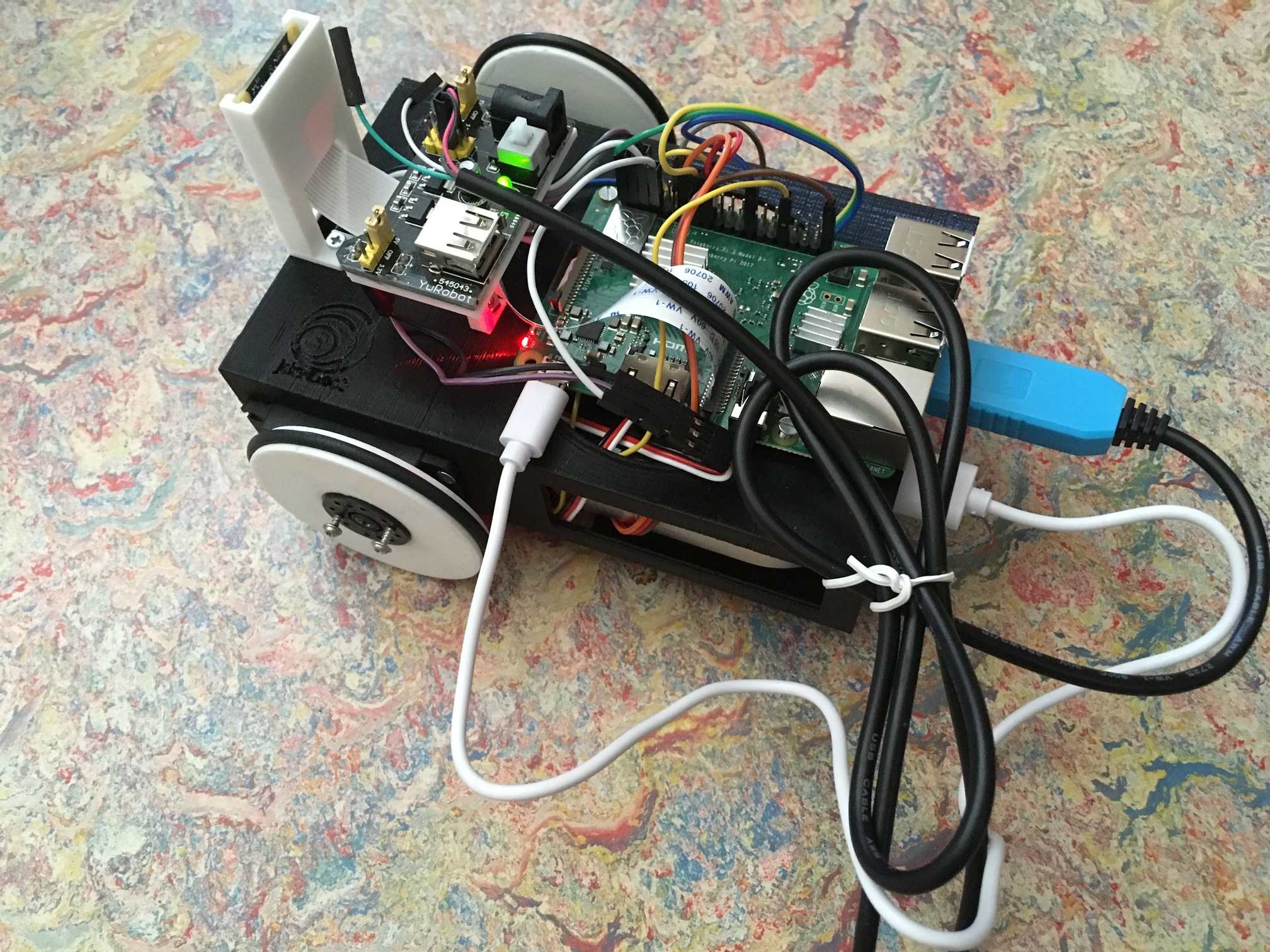
2019.09.20. New PiBot
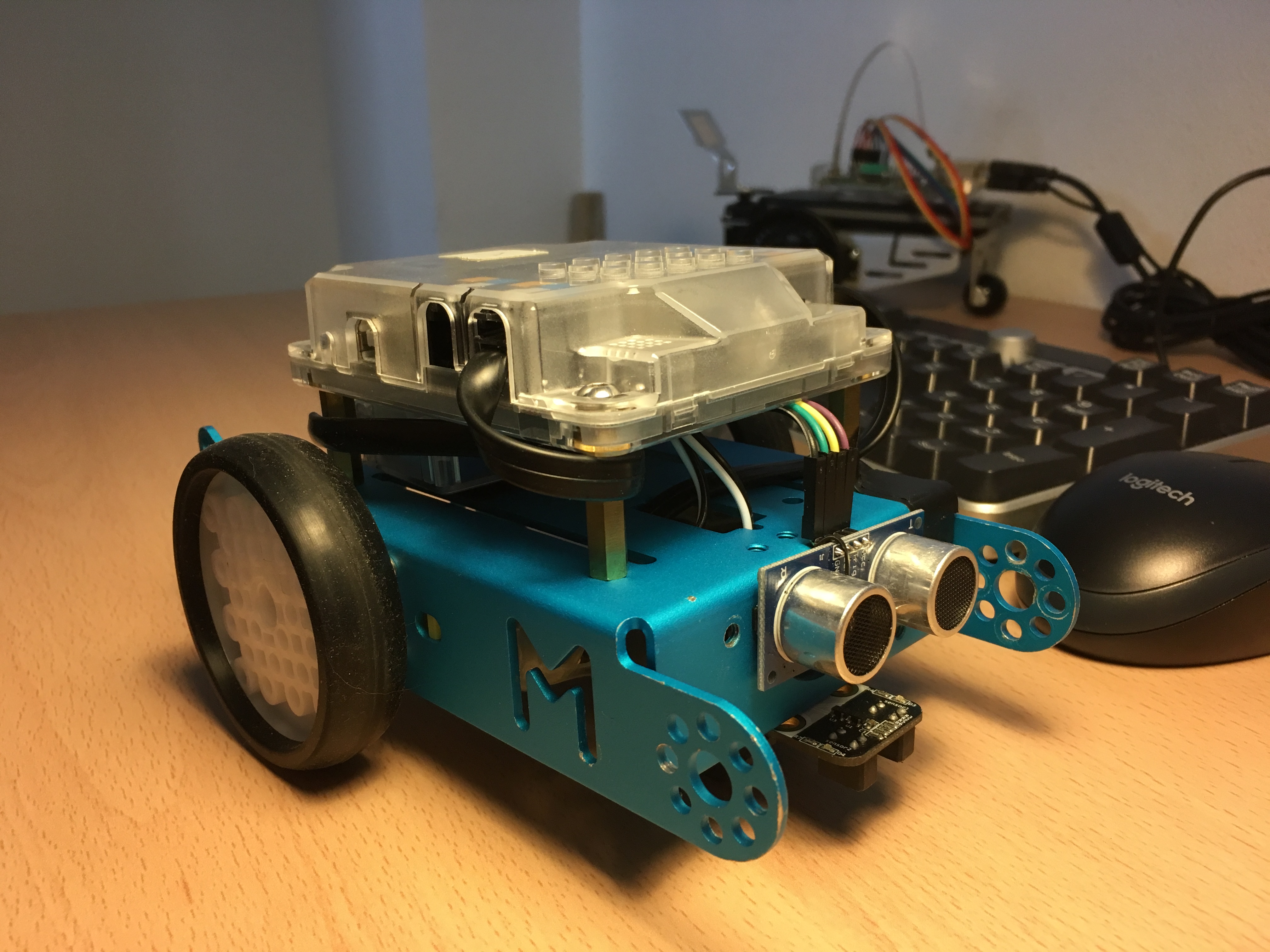
2019.09.13. MBot modified with US model HC-SR04
2019.08.23. Raspberry Pi temperature sensor

Connection schema

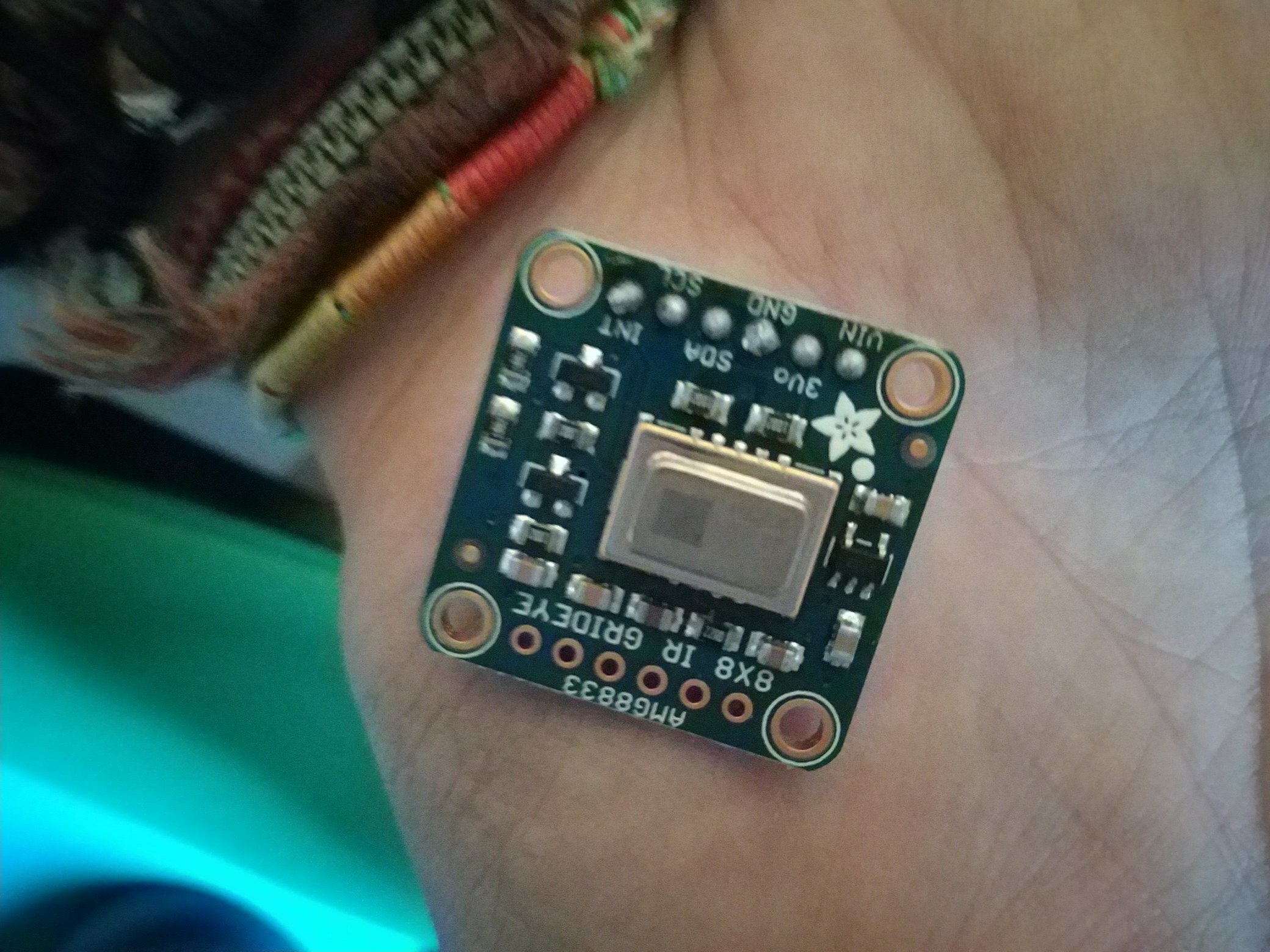
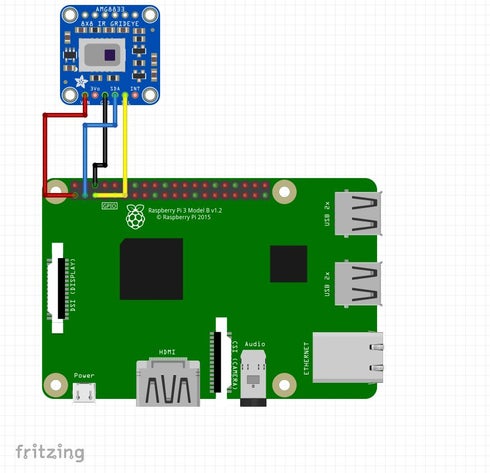
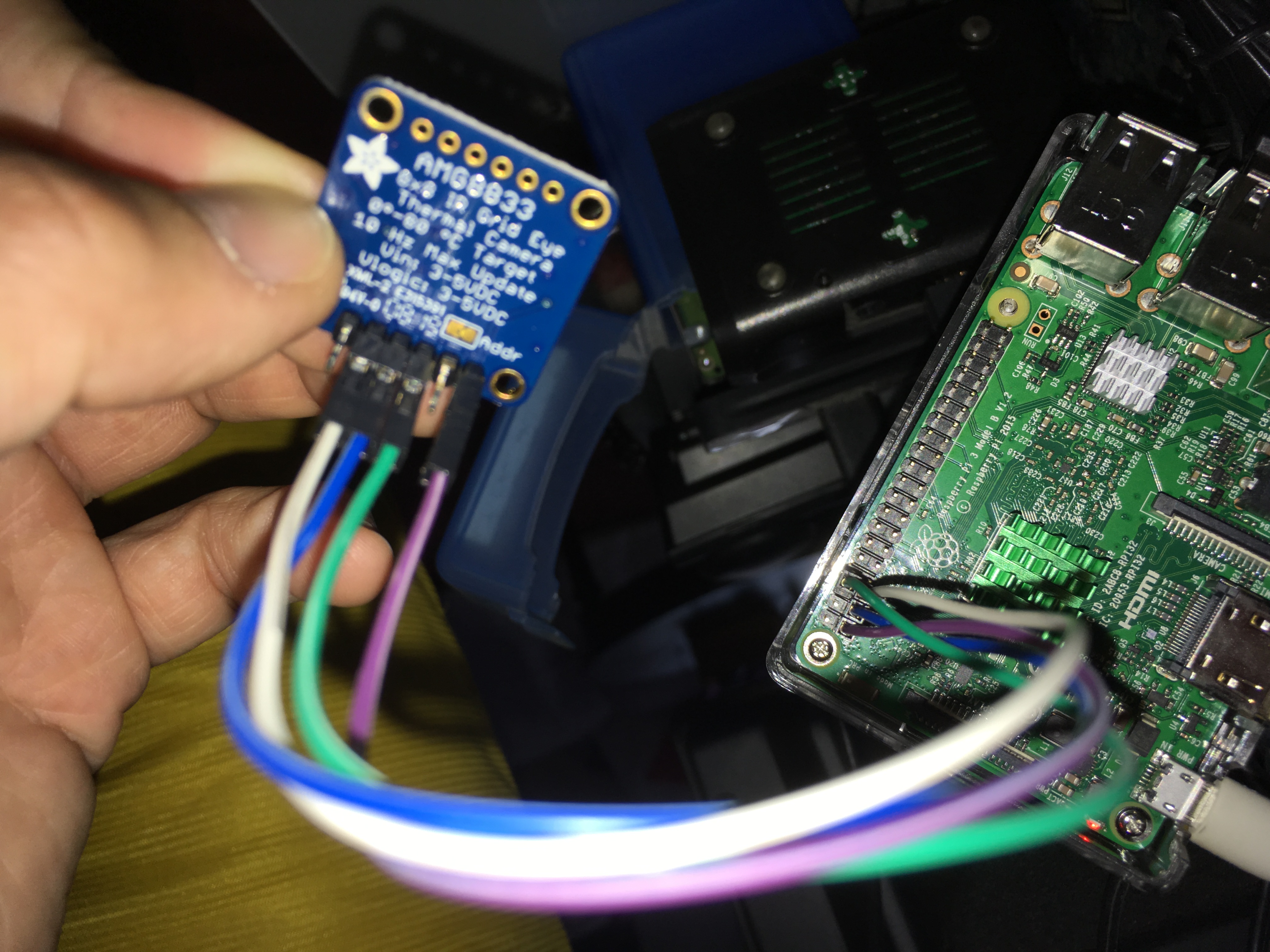
2019.08.23. Raspberry Pi thermal camera
Connection schema

2019.08.03. MBot leds on board depending on US sensor distances
2019.08.03. MBot leds on board depending on motors actions
2019.08.03. MBot leds on board depending on IR sensor B/W colors
2019.07.28. MBot follow-line
2019.07.28. MBot bump-and-go
2019.06.24..28. URJC Robotics Summer Camp
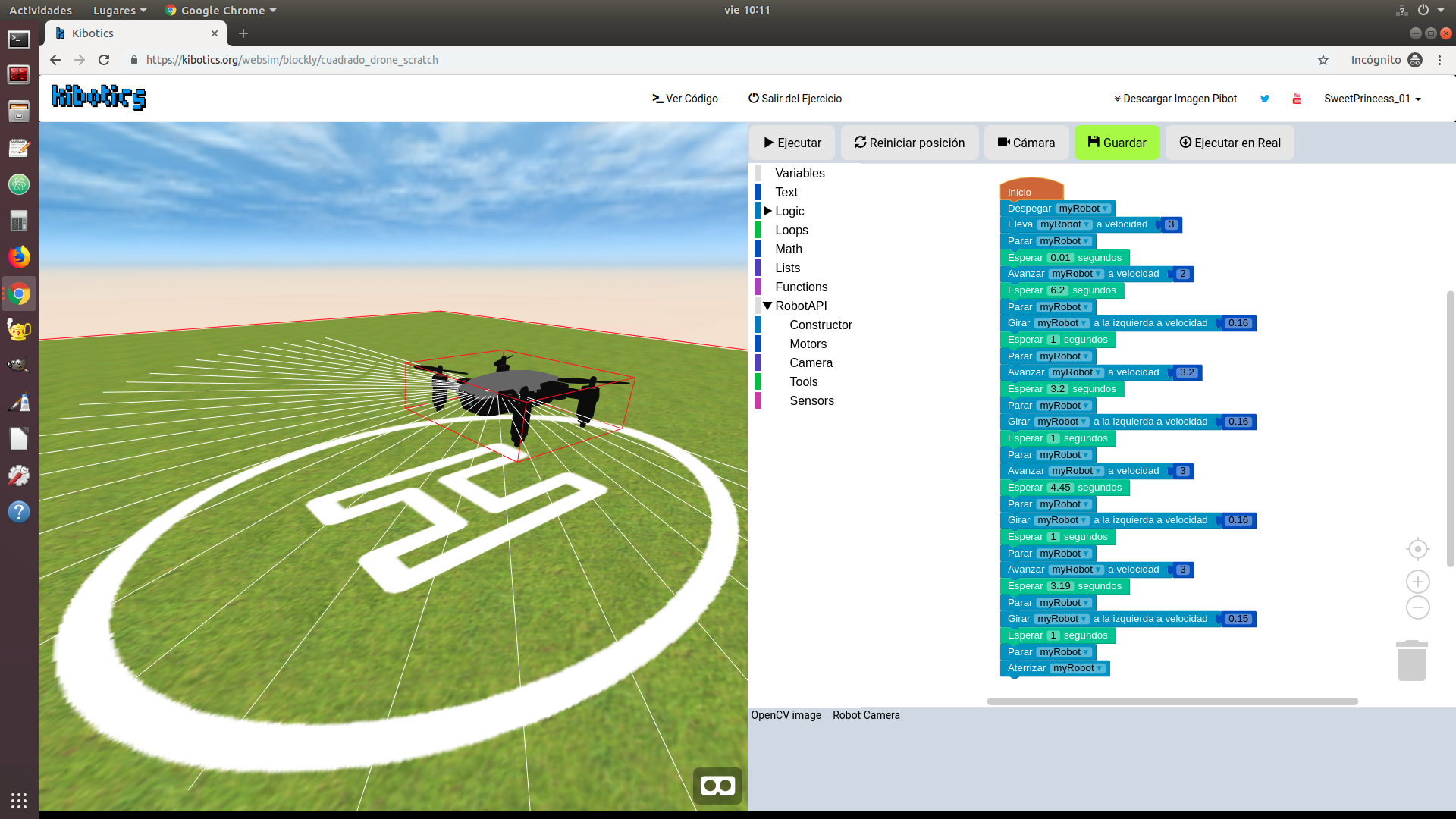
Dron with Kibotics and Scratch
PiBot with Kibotics
Students working in class


2019.06.26. 3D printed PiBot
2019.05.21 Integrating traffic signals into the PiBot's Carpet city
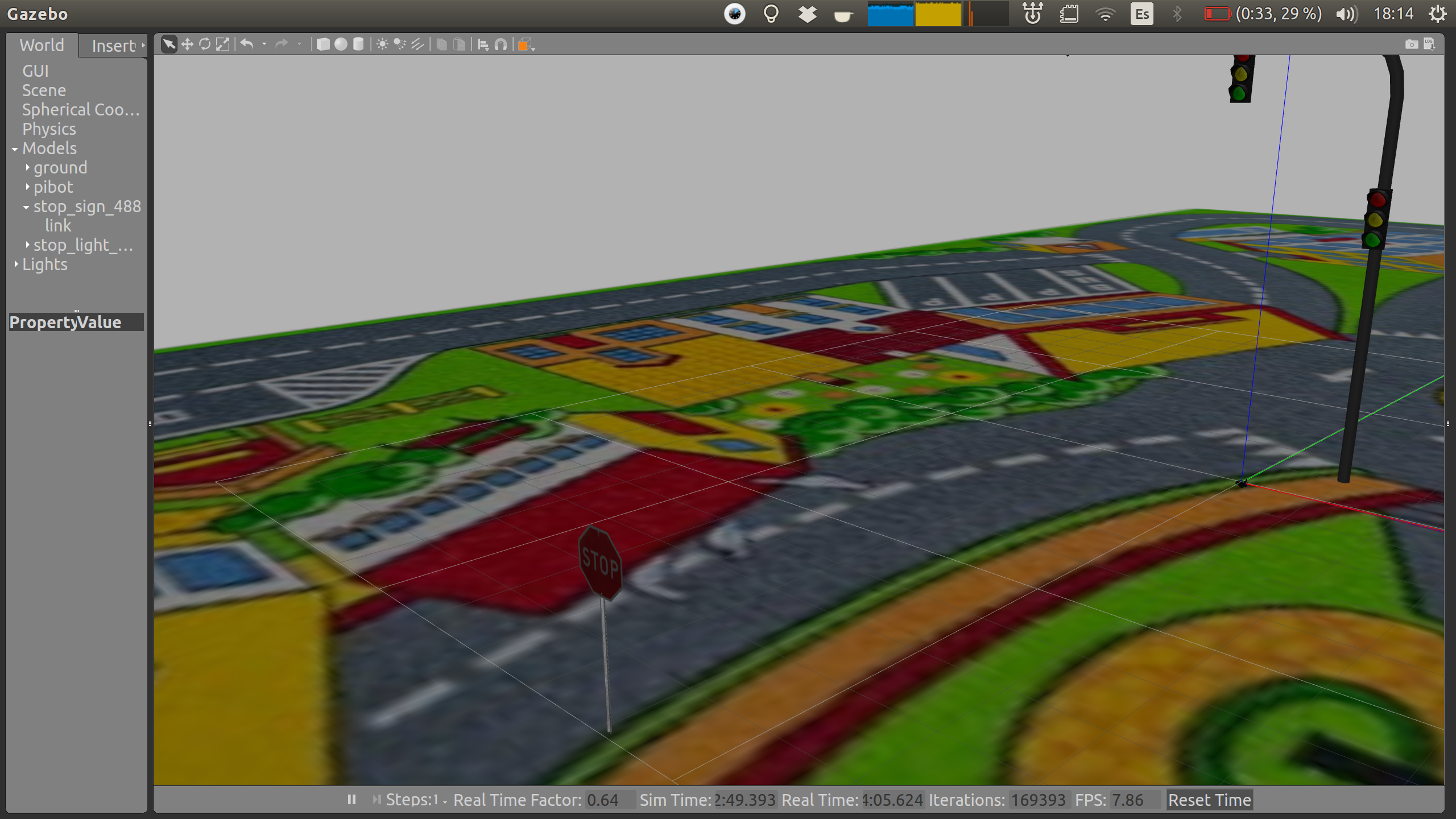
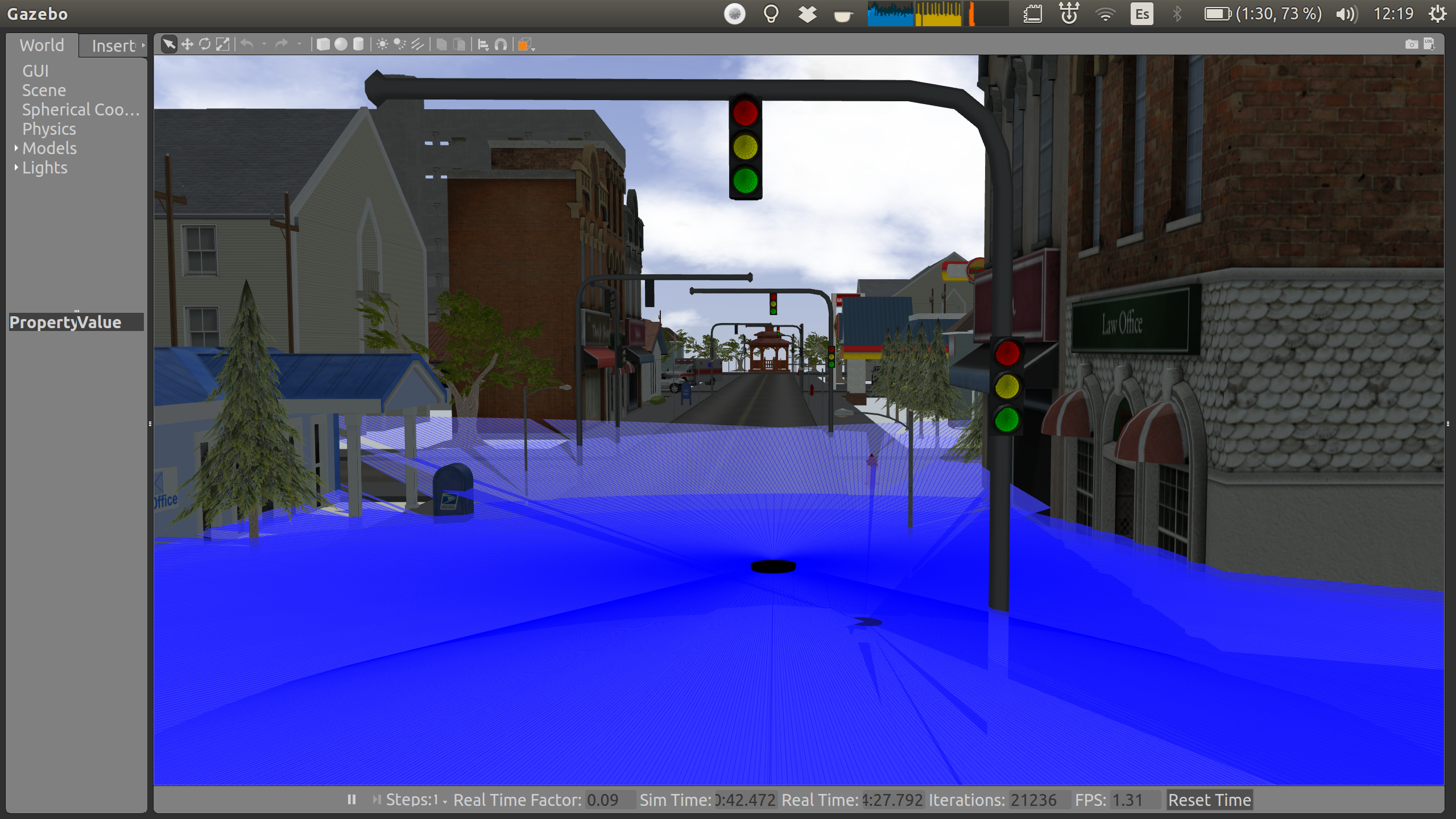
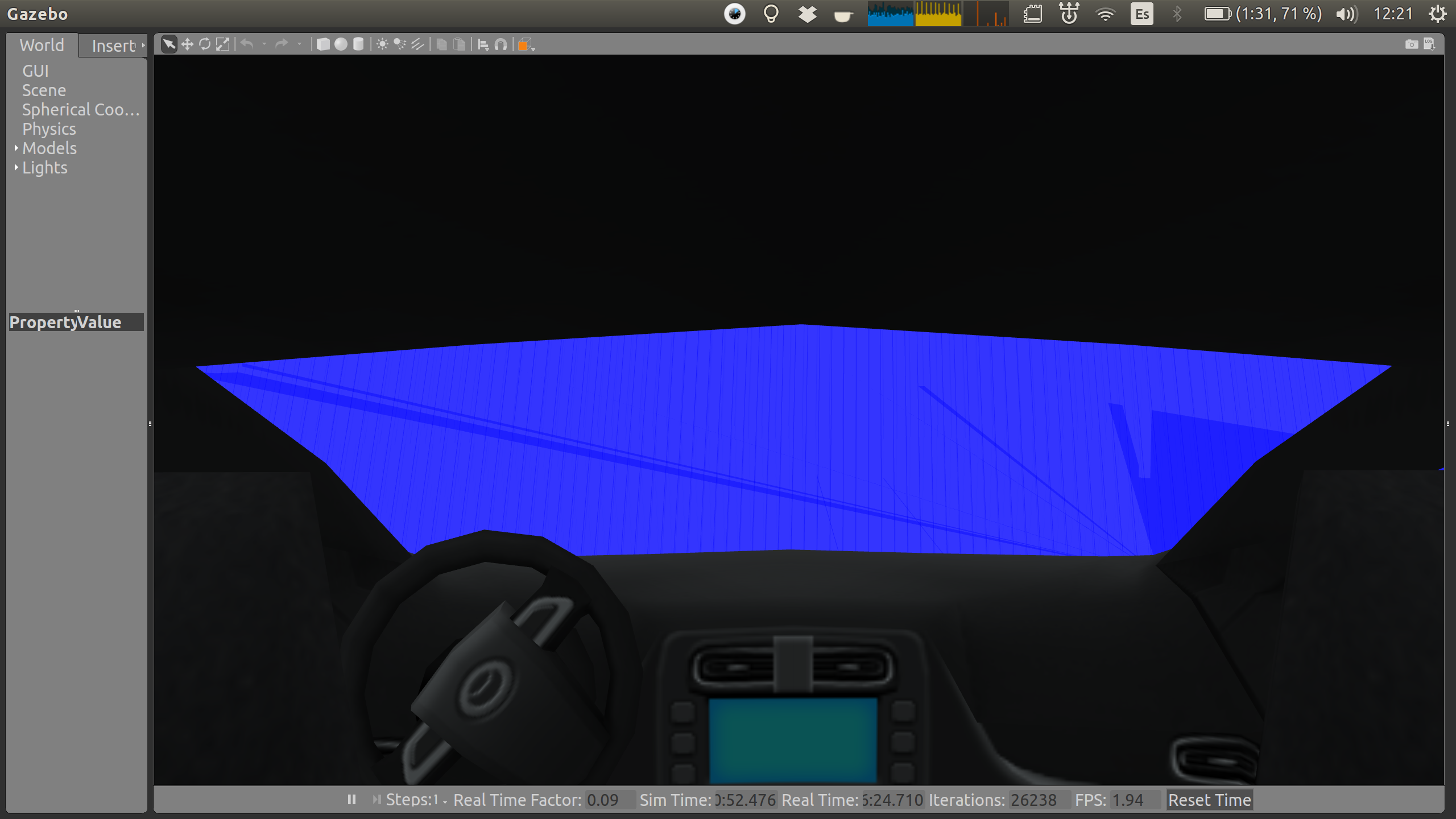
2019.04.09 Testing the city simulated world in Gazebo by OSRF
2019.03.27 Global navigation using Gradient Path Planning (GPP) algorithm
2019.06.26. 3D printed PiBot
2019.05.21 Integrating traffic signals into the PiBot's Carpet city
2019.04.09 Testing the city simulated world in Gazebo by OSRF
2019.03.27 Global navigation using Gradient Path Planning (GPP) algorithm
Improved this exercise to go faster.
2019.03.26 New Gazebo worlds for PiBot based on carpets for kids


2019.03.05 New Turtlebot VFF demos
a) Case 1: Turtlebot is going straight ahead without obstacles:
b) Case 2: Turtlebot is avoiding obstacles while it is driving to its target:
2019.02.26 VFF obstacle avoidance exercise with the real Turtlebot
We can take a look to the VFF obstacle avoidance exercise, using the real Turtlebot.
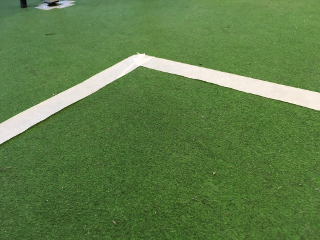
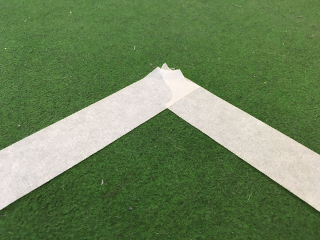
2019.02.19 Follow-Line exercise with the real Turtlebot
Due to the limitations of the enviornment, a new approach to the solution of the follow-line has been tested, in which the (white) line is being left to the right of the robot.
2019.02.13 Mounting the RPLidar over Turtlebot (second part)
The noised caused by the Turtlebot structure's sticks has been solved, so I've been working on this second prototype, which is better than previous one, because the shelf is now clean, which allows to put the PC on top of it.

2019.02.05 Mounting the RPLidar over Turtlebot
The Turtlebot structure includes four sticks which are causing noise into the laser measurements. So, I am testing this new prototype.

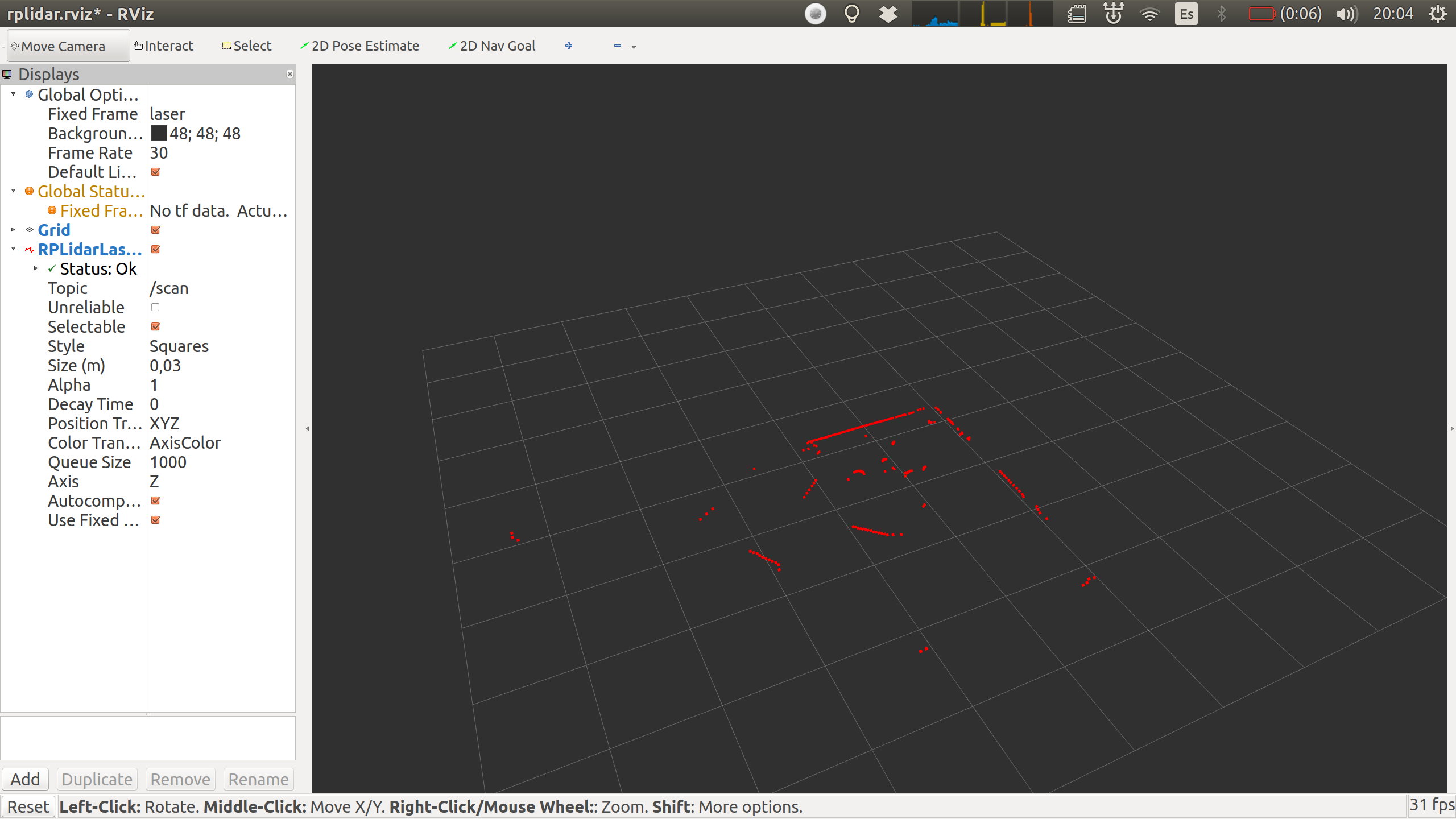
2019.01.28 Testing the RPLidar laser sensor
I've been testing this new laser for the real Kobuki robot, using a Python ROS node called "view_rplidar". It works so fine!
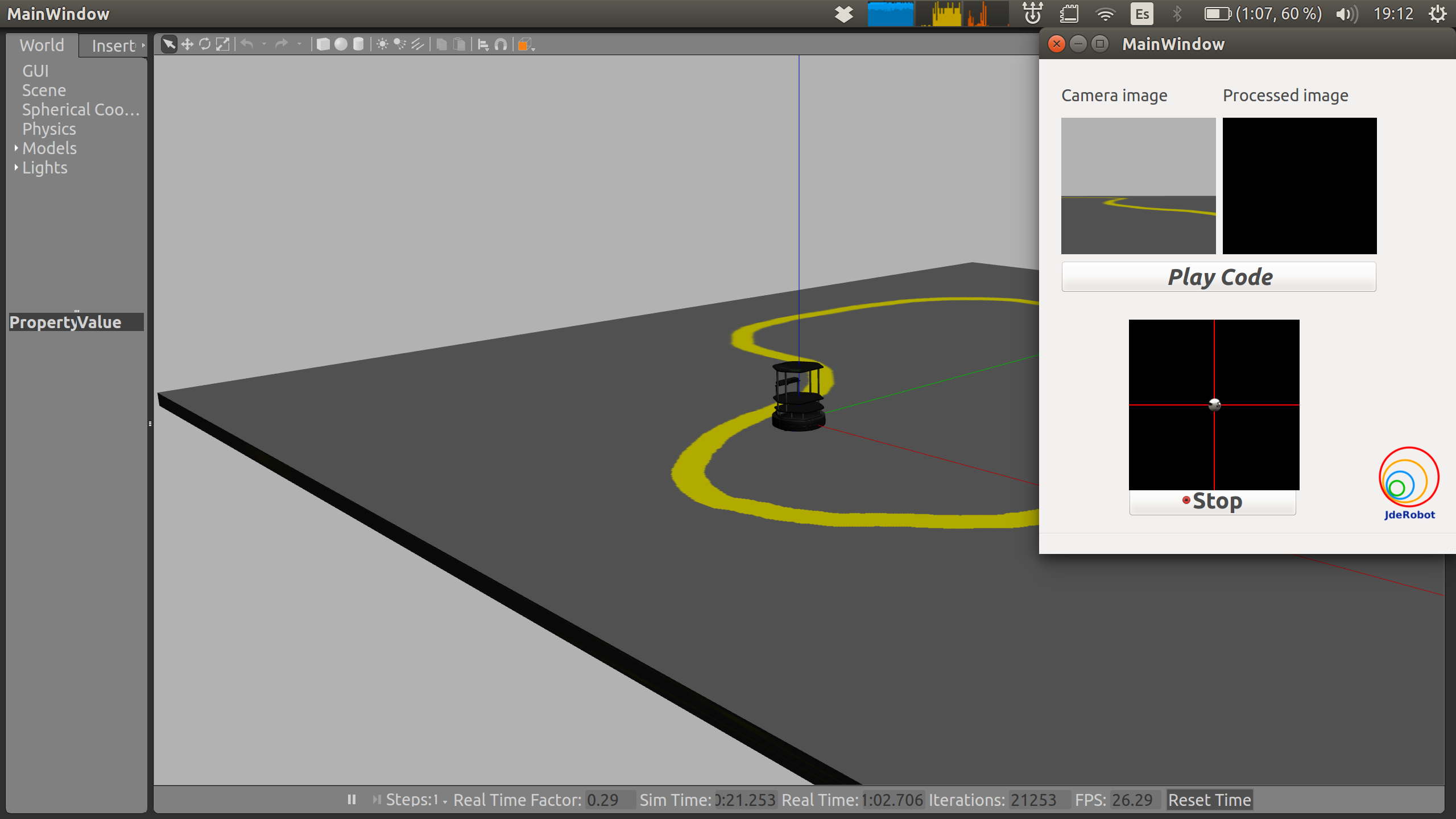
2019.01.22 Testing the follow-line exercise with simulated Kobuki/Turtlebot
I'm testing a new approach to the solution of the follow-line, in which the (yellow) line is being left to the right of the robot.
2019.01.18 New exercise for Academy: follow-line in real and simulated Kobuki/Turtlebot
I start this new year with a new exercise: the classical follow-line, with Kobuki. I've created a ROS node to communicate with the real Kobuki and the simulated Turtlebot in Gazebo.