![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Table of contents
- 2020.12.10. My talk at the XIV Congresso Internacional de Educaçao e Inovaçao
- 2020.08.03. Working on a human-robot interaction system
- 2020.07.30. Supporting Turtlebot2 under ROS Melodic and Ubuntu 18.04
- 2020.05.26. Testing a new sensor: BME680 Breakout by Bosch
- 2020.05.08. Orange inference using a Jetson Nano
- 2020.04.28. Animalaria's surgical simulator for monitoring system experiments
- 2020.04.18. Testing Jetson Nano with TensorFlow: memory problem
- 2020.02.10. Getting started with the animal monitoring
- 2020.01.03. First experiments with the Seek Thermal Camera
2020.12.10. My talk at the XIV Congresso Internacional de Educaçao e Inovaçao
The slides can be found here
.2020.08.03. Working on a human-robot interaction system
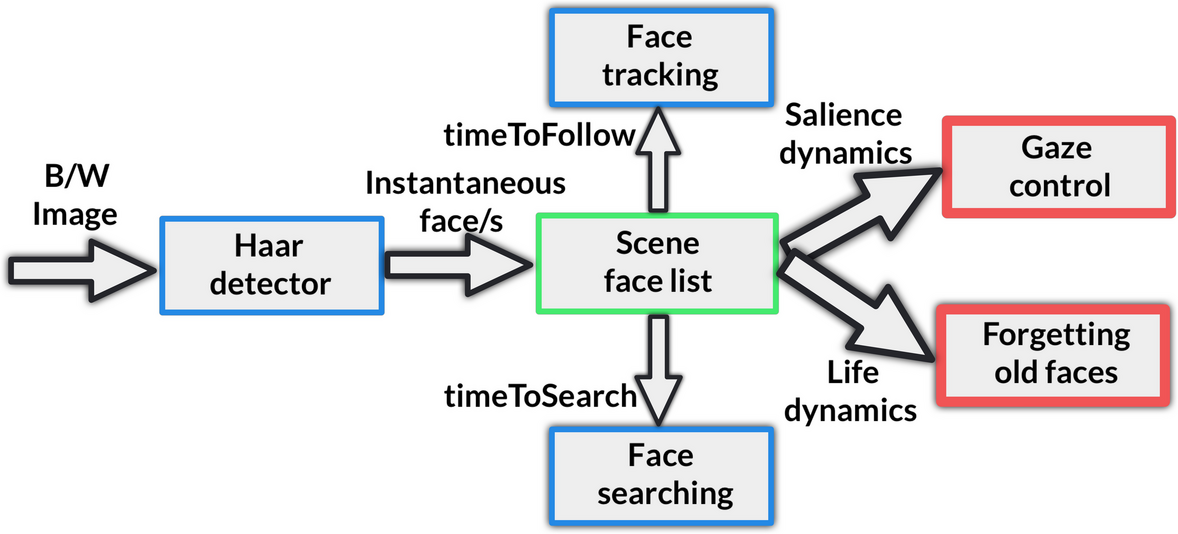
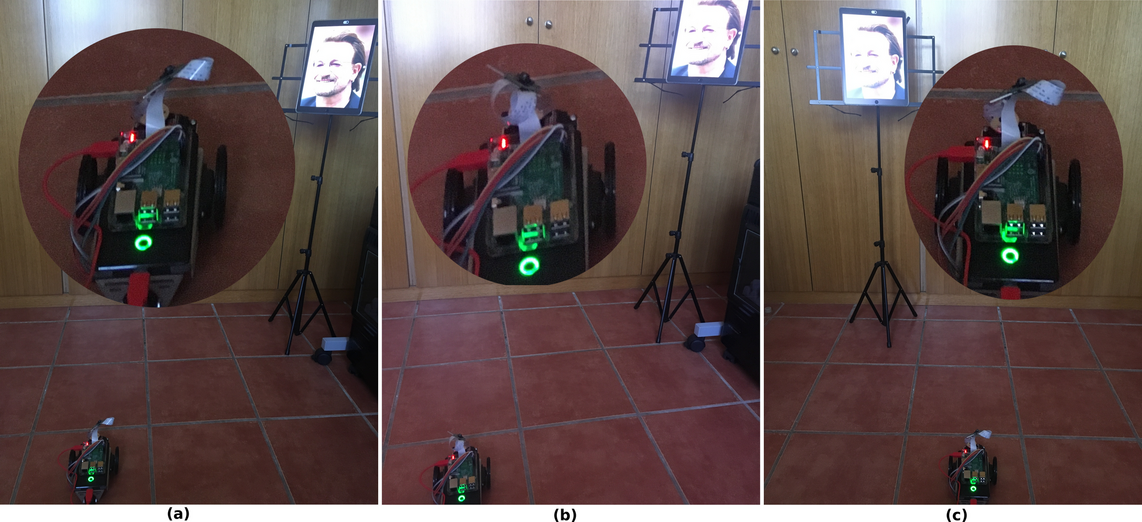
It was finally published in journal Microprocessors and Microsystems. Available online 21 July 2021 (DOI, draft).
2020.07.30. Supporting Turtlebot2 under ROS Melodic and Ubuntu 18.04
Turtlebot2 is no longer supported on ROS Melodic, so it is necesary to use external drivers to make it work.
Firstly, I get Turtlebot2 motors to work using the code of this repository.
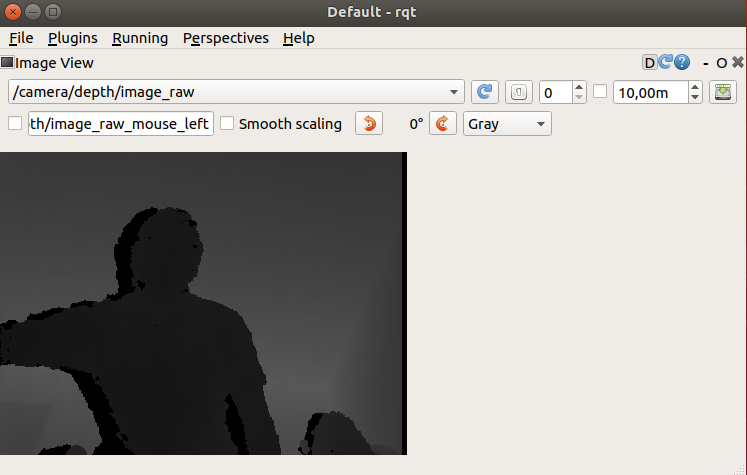
Secondly, the installation of Asus Xtion is quite simple since OpenNI2 is fully supported by ROS and the precompiled packages are available in the official repository. As can be seen in the picture above, the rgbd images are tested using the package rqt:
sudo apt-get install ros-melodic-rgbd-launch ros-melodic-openni2-camera ros-melodic-openni2-launch
roslaunch openni2_launch openni2.launch
rqt
And finally, the RPLidar is also officially supported by ROS, using the rplidar_ros package:
roslaunch rplidar_ros view_rplidar.launch
2020.05.26. Testing a new sensor: BME680 Breakout by Bosch
It contains temperature, humidity, barometric pressure, and VOC (Volatile Organic Compound) gas sensing capabilities. It is connected to the Raspberry Pi board through the GPIO ports and it can measure humidity with 3% accuracy, barometric pressure with 1 hPa absolute accuracy, and temperature with 1ºC accuracy.

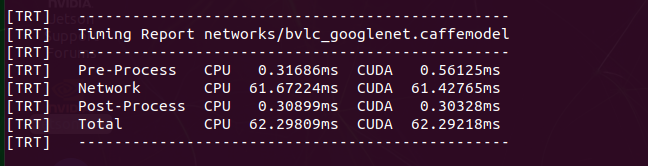
2020.05.08. Orange inference using a Jetson Nano

2020.04.28. Animalaria's surgical simulator for monitoring system experiments

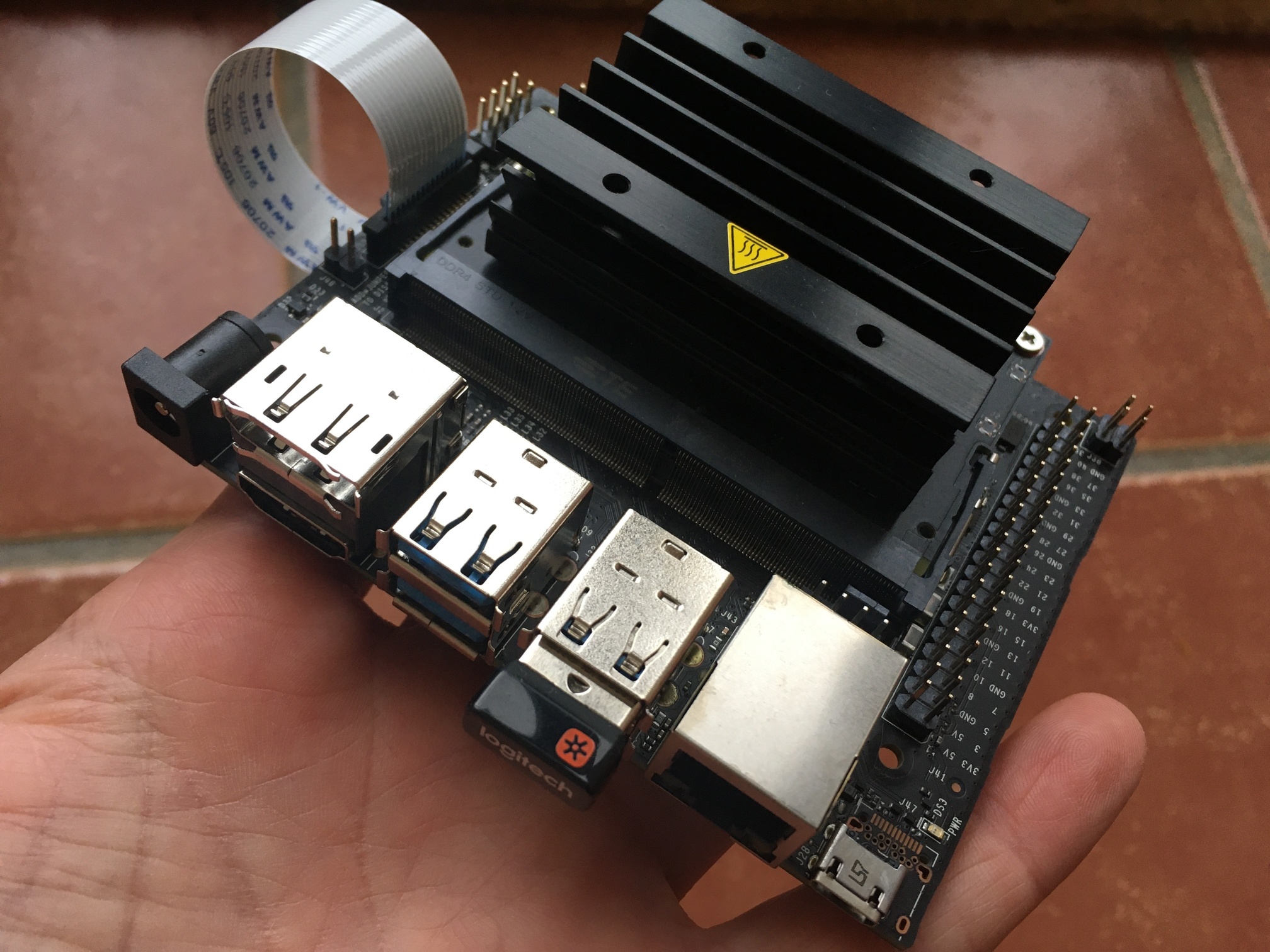
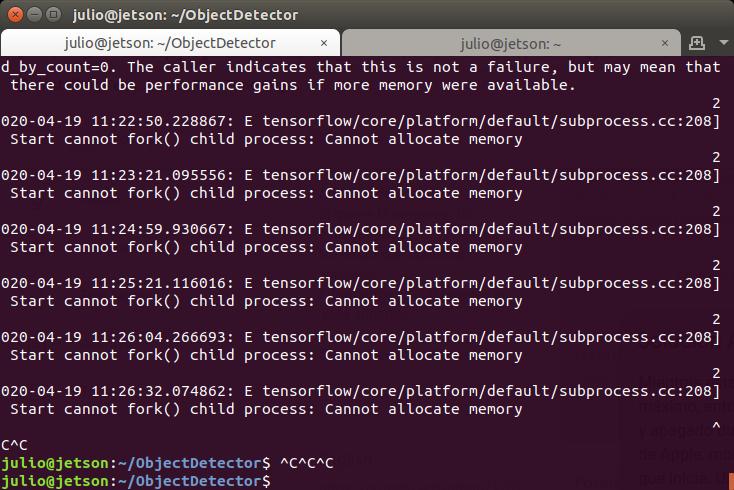
2020.04.18. Testing Jetson Nano with TensorFlow: memory problem
2020.02.10. Getting started with the animal monitoring

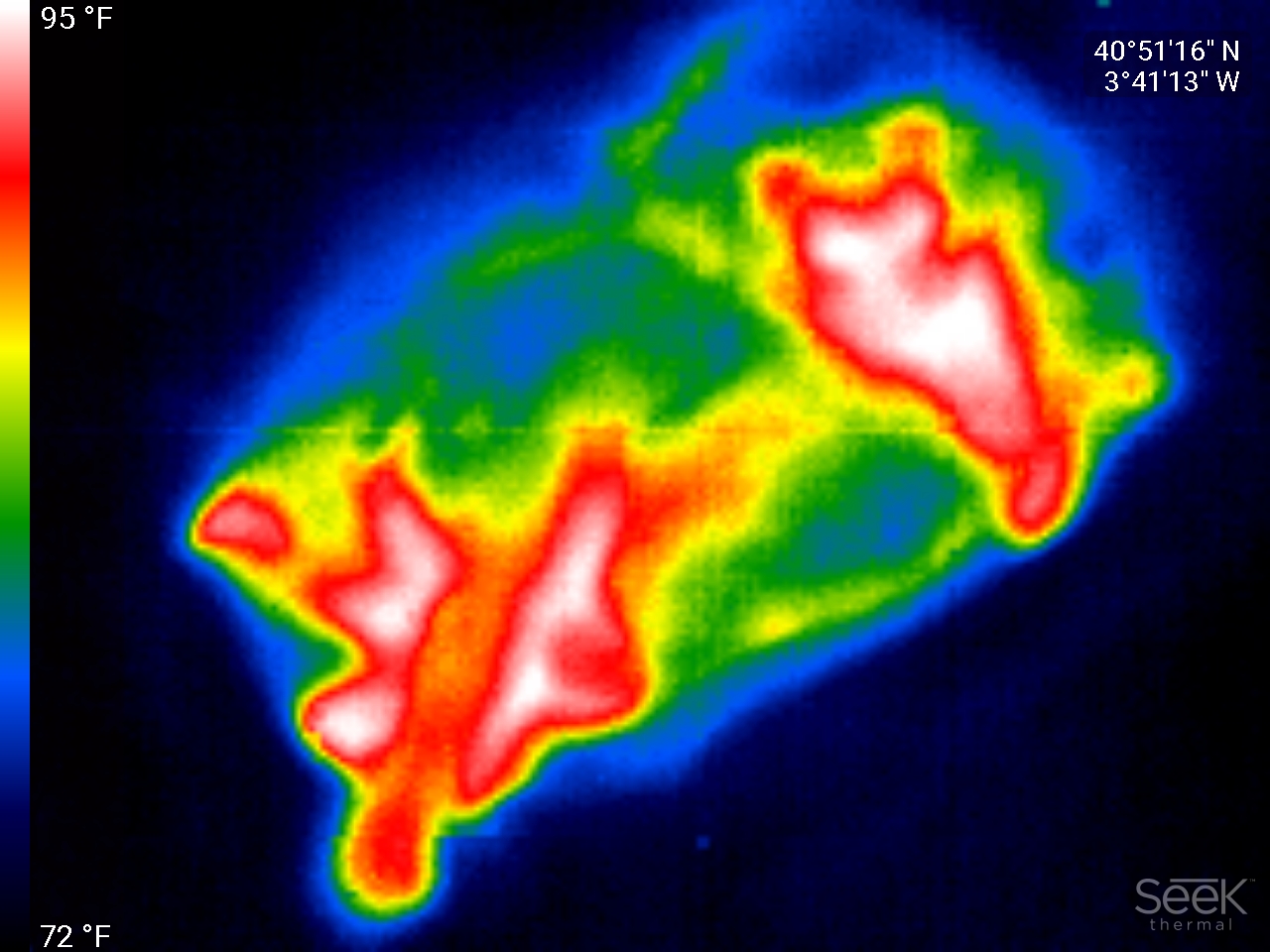
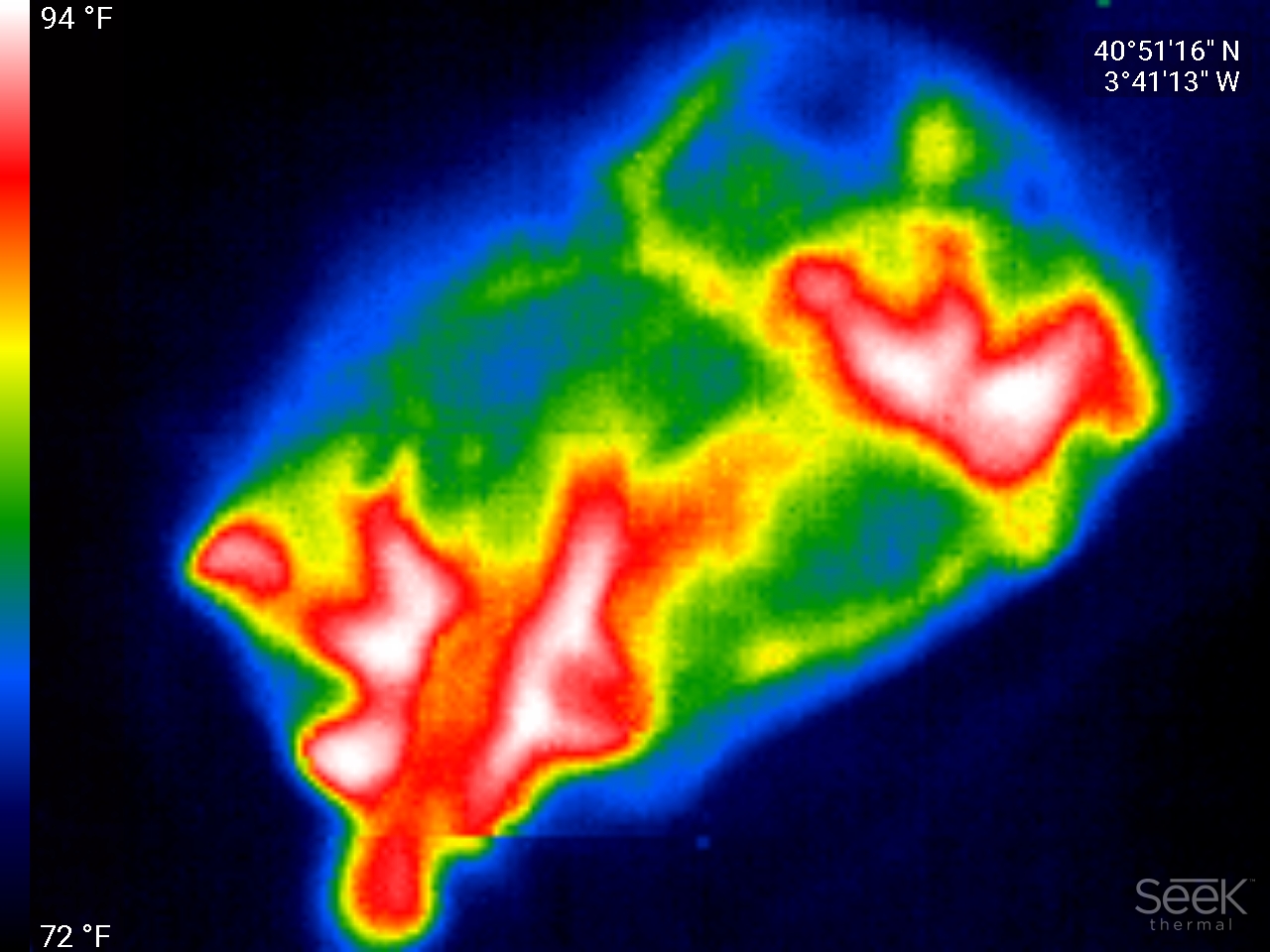
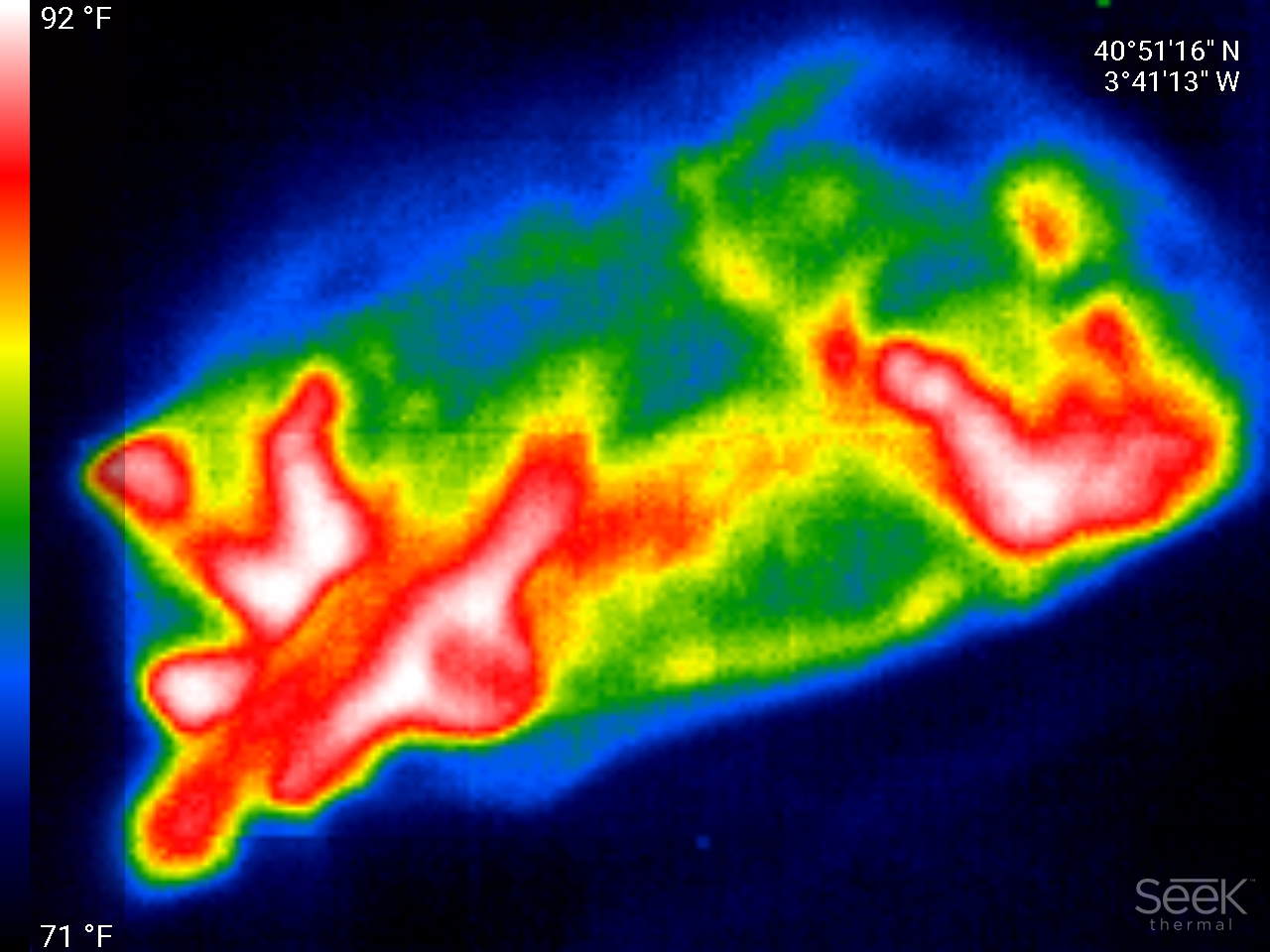
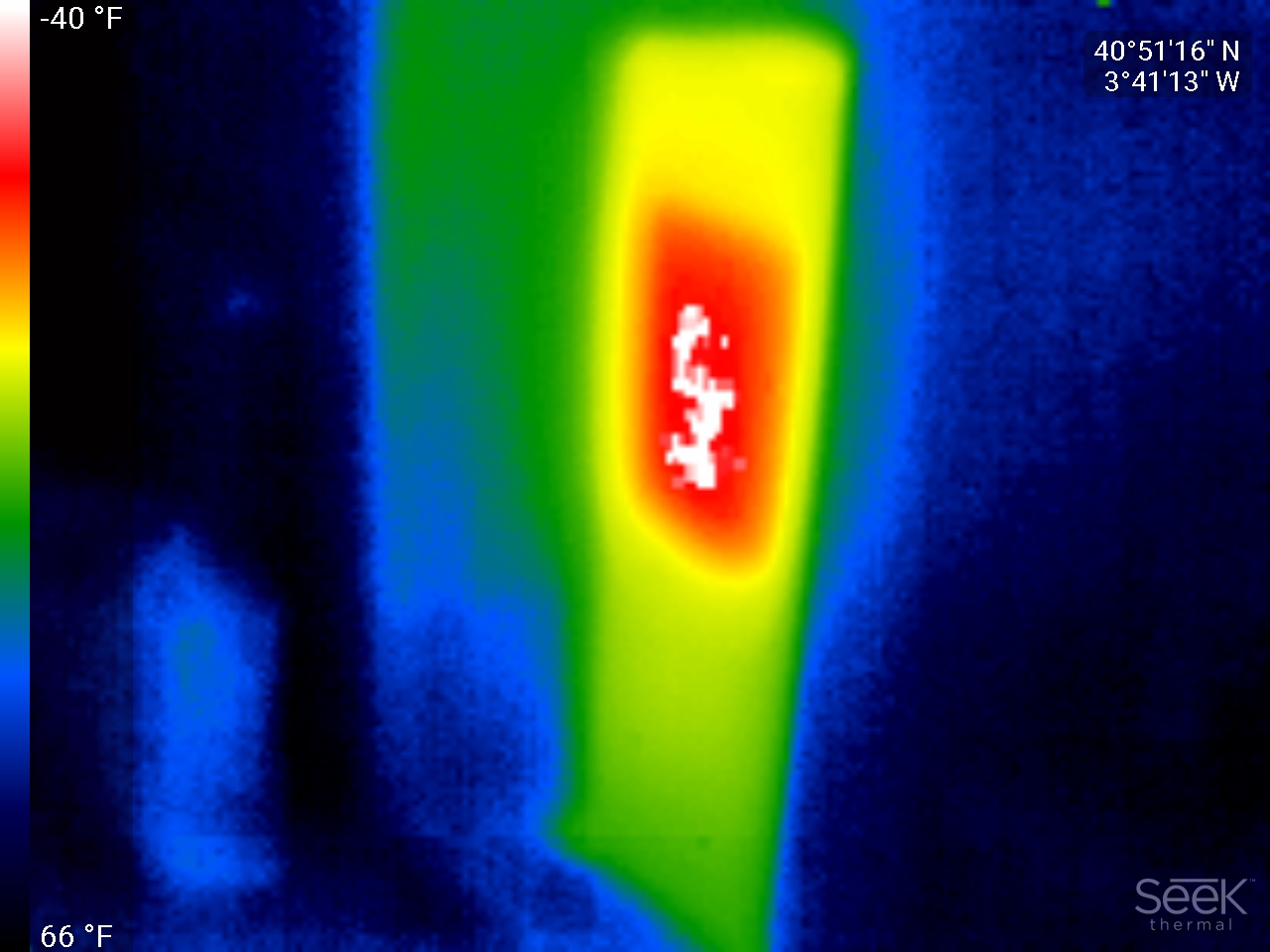
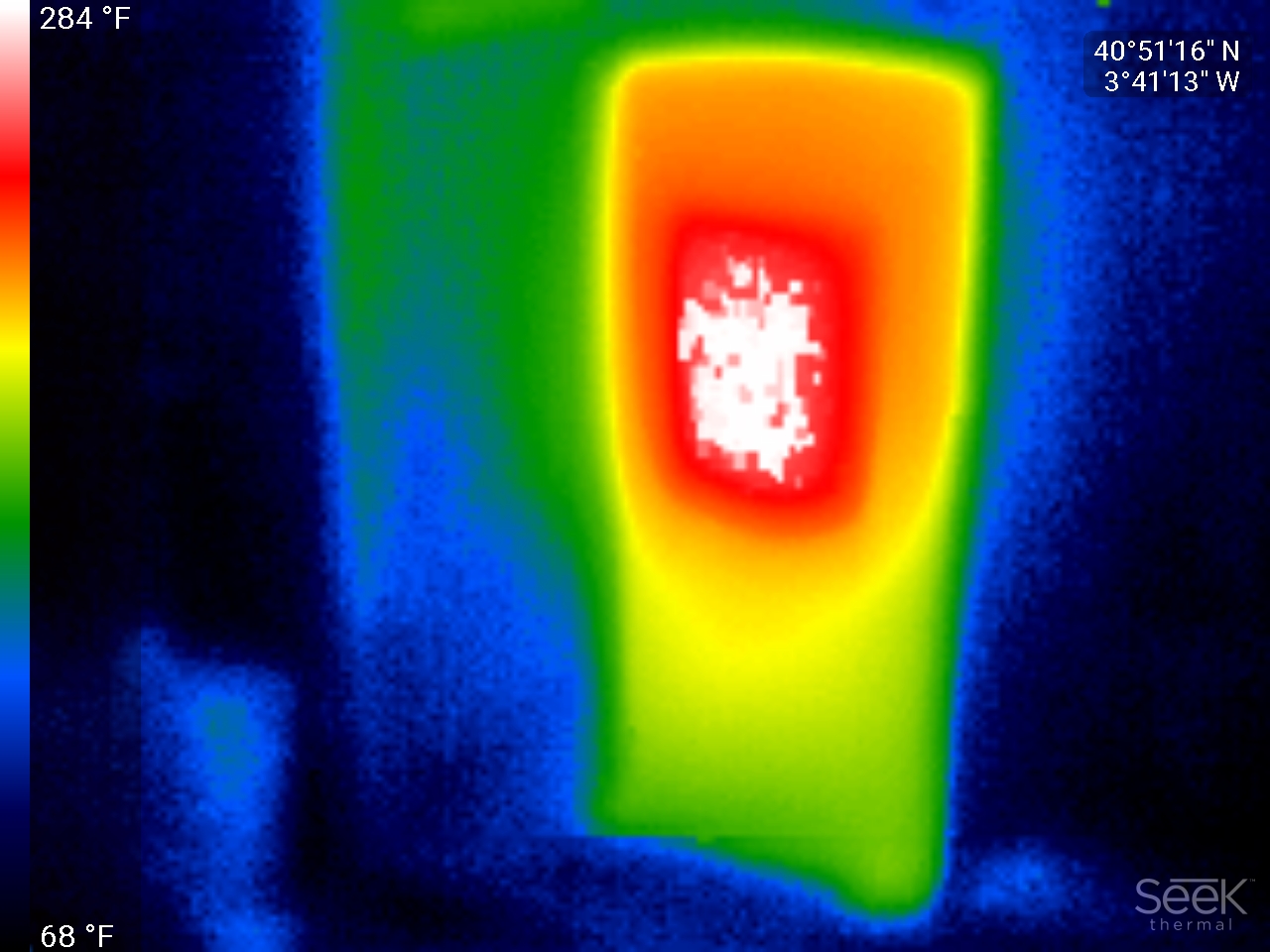
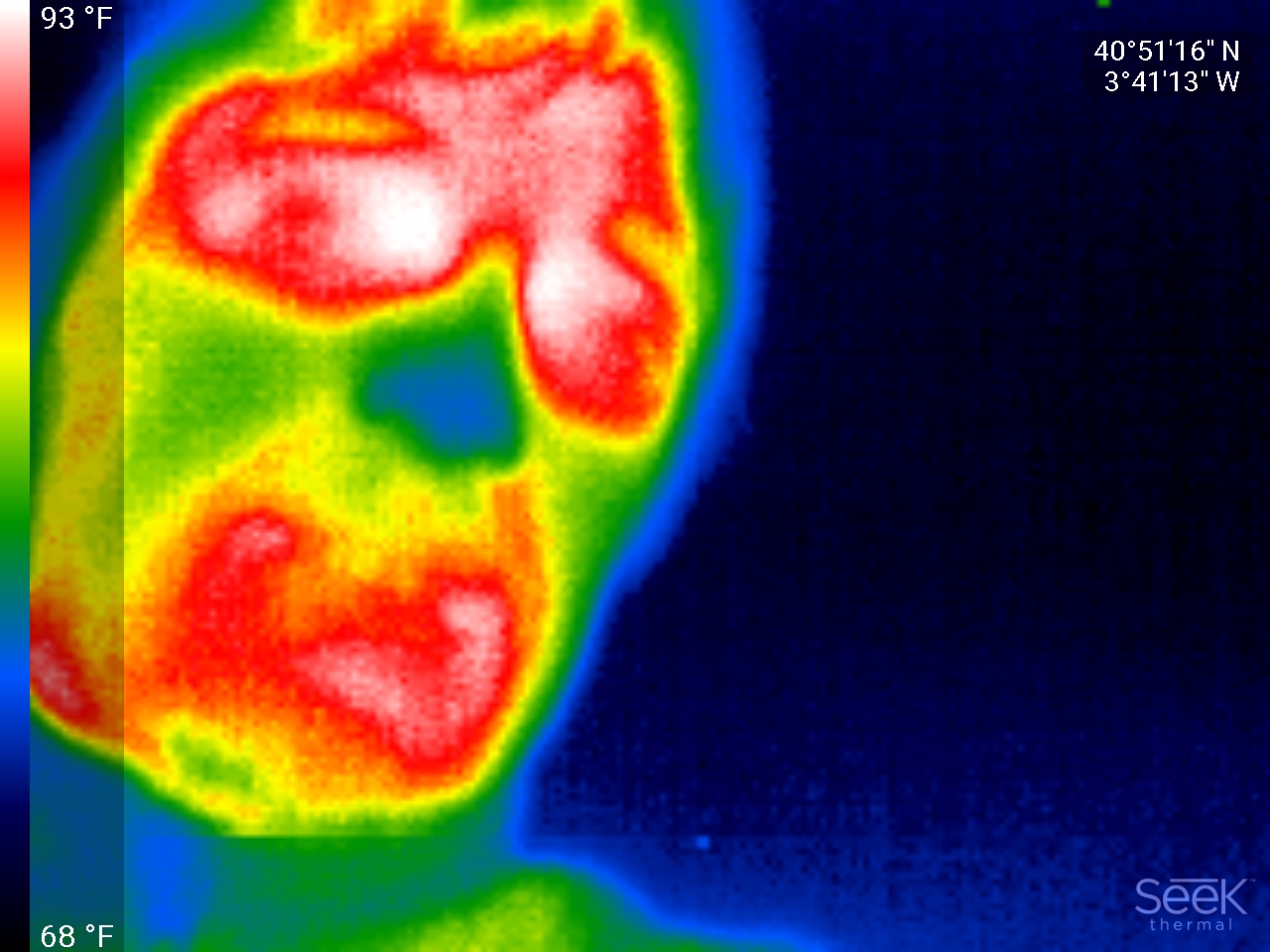
2020.01.03. First experiments with the Seek Thermal Camera