![[Julio Vega's home page]](https://gsyc.urjc.es/jmvega/figs/cabecera.jpg "Julio Vega's home page")
Table of contents
- 2014.12.18. Building a new Arduino robot by Parallax
- 2014.12.12. Paper about my experience using Piaget theories
- 2014.09.17. Paper about Gazebo+JdeRobot
- 2014.09.10. Searching for educational platforms: Scratch, Lego, LabView
- 2014.06.04. Cameraview client on Python
- 2014.05.14. Last thesis topic to be covered: Robotics in Education
2014.12.18. Building a new Arduino robot by Parallax

2014.12.12. Paper about my experience using Piaget theories
I introduce this paper in JITICE at Rey Juan Carlos University.
2014.09.17. Paper about Gazebo+JdeRobot
We introduce this paper in CUIEET, workshop at Almaden.
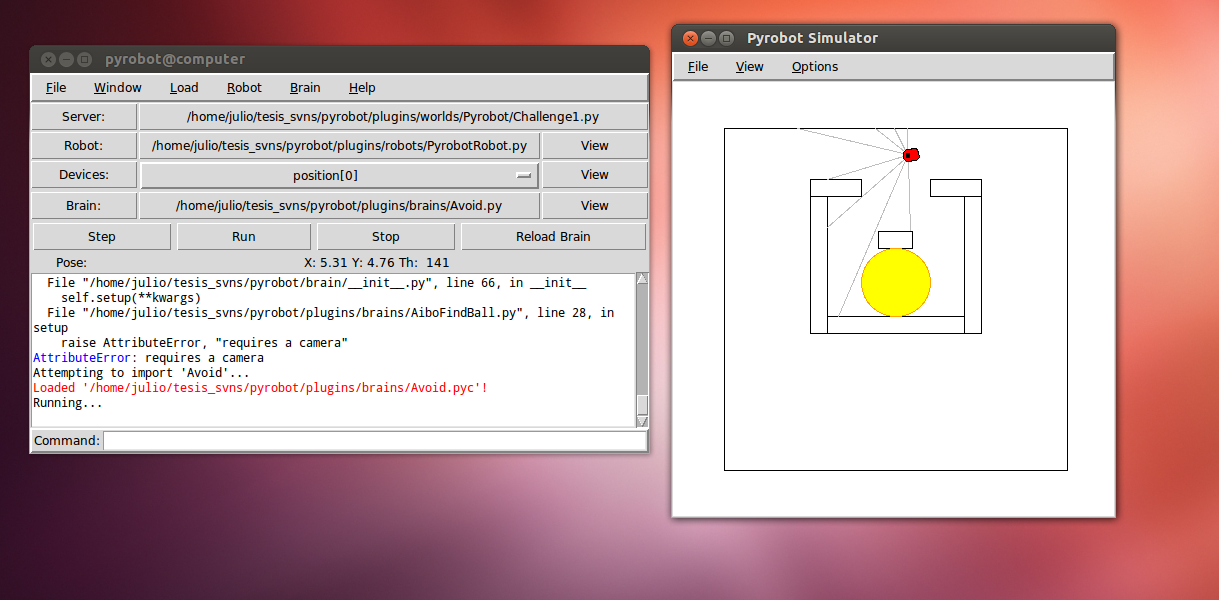
2014.09.10. Searching for educational platforms: Scratch, Lego, LabView
Testing VisualHFSM.
Kobuki fails loading models and meshes.
Starting with Introrob on Python.
Testing alternatives: PyRobot (pyrorobotics.com), PyMite, SimRobot.
Installing and testing Scratch 2.0 on a 64bits computer.
Testing Lego simulator from U. Paderborn (http://ddi.uni-paderborn.de/en/software/lego-mindstorms-simulator.html) and jmeSim from the U. of New South Wales.
2014.06.04. Cameraview client on Python
Creating an Ice-Python example.
Creating an image server on Python.
Creating the Cameraview client on Python.
Introduction to VisualHFSM.
2014.05.14. Last thesis topic to be covered: Robotics in Education
After a "working break", we continue this PhD. We start studying the state of art around this topic, because the goal of this last stage is closing high level robotic programming algorithms to secondary education level.
We choose Python as an easy-to-learn programming language. We start to code different basic programs.
We start to prepare a new paper, where we will show our experience of this two years working as a robotic teacher on secondary education, using Piaget constructivism theories.


